产品报价与咨询,请点击上面↑↑↑【进入该公司展台】
或者 点击 右边 【联系厂商】
BECKHOFF-KL3312-0021代理商、经销商那儿的价格是?厂家儿?代理商、经销商一般*低报价是?代理商、经销商有现货么?BECKHOFF-KL3312-0021的plc模块好用些?还是西门子的或者三菱的plc模块好用些?信捷plc好些?还是台达好些?
我司现货供应BECKHOFF-KL3312-0021,以及承接电厂、水泥厂、钢厂、煤矿、机械制造厂家、国内外备件计划单(采购清单)报价。

秉泽商贸以工业用品销售采购,产品选型指导等服务起步,以销售ABB、西门子、施耐德、常熟开关、上海人民电器、天水213、杭申电气、欧姆龙、图尔克、倍加福、亚德客、费斯托、SMC、CKD等国内外产品,并与国内工业品行业的中小企业合作,积极推广我国研发的产品。公司支持多种结算方式,例如支付宝、网银、银行付款等等。同时支持线上的合同制模式销售,在线报价,在线指导,以及线下的安装指导产品维修,定期回访,把售前与售后紧密地结合在一起。
|
产品咨询、产品报价、产品采购 请点击正上方(标题下面)↑↑ ↑ 进入该公司展台 |
 |
| 里面有我司联系热线 |
创造效益“的经营理念。公司建有新产品科研工作站、国际化企业技术中心,实现国际化管理仁术与高层次人才队伍建设相结合,为公司长远发展奠定了坚实的技术基础和人才基础;具有一支以博士生、研究生、本科生为主的多层次研发队伍,在产品研究、健康知识开发和应用上具有丰富的经验和技术创新能力;拥有的试验设备,模具制造,零部件自动化生产,进口焊接自动化,断路器装配检测流水线等一大批制造设备,确保了产品品质;并建立和完善的质量环境体系,实验以ERP管理为重点的信息化、网络化管理,稳步提高管理水平,不懈追求“绿色环保企业”,打造一个技术、......保护,当它们发生严重的过载或者短路及欠压等故障时能自动切断电路,其功能相当于熔断器式开关与过欠热继电器等的组合。而且在分断故障电流后一般不需要变更零部件,已了广泛的应用。其原理如下,断路器内部脱扣机构,有一个时系数不同的二种金属粘合一起的双金属片,当电流过其额定值时,双金属片,并向系数小的不边弯曲,带动脱扣机构,使其跳开断电。定义1:能够关合、承载和开断正常回路条件下的电流,并能关合、在规定的时间内承载和开断异常回路条件(包括短路条件)下的电流的开关装置。定义2:用以切断或关合高压电路中工作电流或故障电流的电器......

上有更多的选项和更高的精度。”USBC经理Stremmel评论道。“E.A.R.L能够处理直径较大且转速较快的球。与我们先前使用的机器人解决方案相比,E.A.R.L的移动和设置的修改要简单很多,且精度也高很多。“ARM始终将自动化技术与新工具和创新工艺相结合,以优化和提高其解决方案的性能。”StephenGrupinski解释并补充道:“我们的应用本身就很复杂,而且经常需要为客户量身定制,因此需要一个灵活的控制平台,不管我们的客户有什么样的要求都能够马上完成配置。Beckhoff开放、模块化的控制结构就是我们......或更换零配件;4)免费对采购人相关人员进行技术培训,直至操作人员或技术人员能够熟练操作该设备;5)在质保期满后,我方提供长期技术支持,随时响应采购人提出的疑问;长期提供零配件和维修服务,价格优惠。服务内容1)预防性维护在系统投入试运行后一年内,我方将两名技术骨干跟踪系统的运行状况,协助用户对系统应用软件进行管理和维护,以减少系统可能出现的潜在问题。2)改正性维护在系统的硬件、软件的有效期内,如存在硬件错误或新版本升级,我方提供这方面的一切更换和修正服务,以保证系统的正常运行。3)系统运行服务?运行期间故......

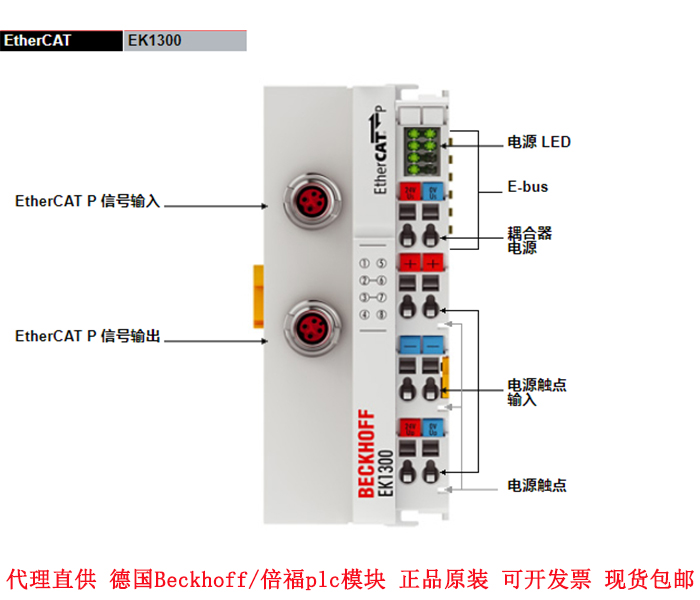
BECKHOFF-KL3312-0021以及CX1020-A001、CX1030-0CST、倍福plc模块CX1030-0000、CX1030-0010、倍福plc模块CX1030-0011、CX1030-0012、倍福plc模块CX1030-0013、CX1030-0100、倍福plc模块CX1030-0110、CX1030-0111、倍福plc模块CX1030-0112、CX1030-0113、倍福plc模块CX1030-0020、CX1030-0021、倍福plc模块CX1030-0022、CX1030-0023、倍福plc模块CX1030-0120......锐利的过渡(加速度是三角形,如果设置为不同的A,V,J参数,也可能是梯形,但是不管怎样,这样的运动效果是比较稳定可靠的)为了让函数更加简单和通用,JOG运动可以认为是多轴联动的一种特殊情况。比如AB两轴,A_1和B_1是他们的起始位置,A_2和B_2是他们的结束位置,如果A_2=A_1+99999(一个很大的值),B_2=B_1,那就成了针对A轴的正向JOG运动,而如果A_2不等于A_1,B_2也不等于B_1,那么就是*一般的多轴的联动(可以参考机器人学导论,整个流程大致是计算*关节差值,根据给定的速度,加速度,......。
