西门子CN数字量模块全新原装未拆封
西门子CN数字量模块全新原装未拆封西门子CN数字量模块全新原装未拆封
SIEMENS西门子上海朕锌电气设备有限公司
联系人:田敏 (田工)
24小时销售及维修热线:
电 话: 传 真:
手 机: Q Q : 1944287917
微信(手机同步)
西门子系列回收
地址:上海市金山区枫湾路500号
西门子博大精深
上海朕锌西门子一级代理商
公司主营:西门子数控系统,S7-200PLC S7-300PLC S7-400PLC S7-1200PLC 6ES5 ET200 人机界面,变频器,DP总线,MM420 变频器MM430 变频器MM440 6SE70交流工程调速变频器6RA70直流调速装置 SITOP电源,电线电缆,数控备件,伺服电机等工控产品。电话: 手机: 商务QQ:1944287917
描述
本文列出了可订购的分布式 IO 设备的附件的览。
防爆隔板
如果在本质安全区域给 ET 200M 组态有源总线模块,需要在非本安模块之间安装防爆隔板。

图. 01
把防爆隔板安装在总线模块的右侧。
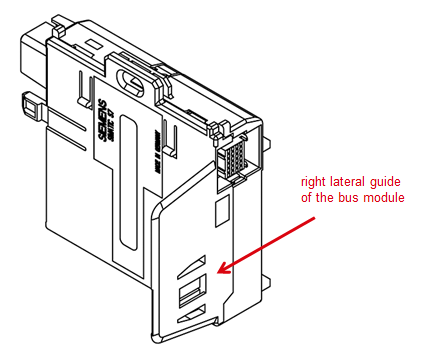
图. 02
图. 03 是带有源总线模块的安装导轨、S7-300 模块和防爆隔板的尺寸图。

图. 03
如果用总线连接器组态 ET 200M,可以使用占位模块来隔离标准模块和本安模块。
电缆接线盒 LK393
除了模拟量模块 SM331(订货号:6ES7331-7SF00-0AB0)所有防爆 IO 模块都需要从前连接器为其提供 DC 24V 负载电源。通过使用电缆接线盒 LK 393 保持本安区和非本安区线缆的小距离,来实现过程信号安全隔离。过程信号在下面,24V 电源线在上面的隔离管中。
注意
当使用电缆接线盒 LK 393,必须使用螺钉连接方式的前连接器。如果使用弹簧连接方式的前连接器,则不能关闭模块前盖板。
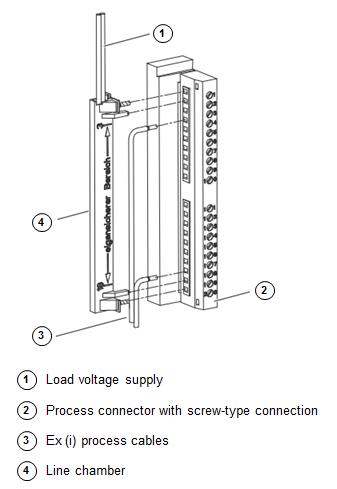
图. 04
背板总线盖板和总线模块盖板
使用背板总线盖板来封闭不用的插槽。用总线模块盖板用来封闭后面的总线模块。总线模块盖板是随总线模块 BM PS/IM 和 BM IM/IM 一起提供的。背板总线盖板需要单独订购。

图. 05

图. 06
更多信息
有关分布式 IO ET 200M 的更多信息可以参考手册,条目 ID 1142798。

说明:
对于多OLM可参考手册:条目号8331164
对于多OLM可参考FAQ:条目号19758281
建立带有两个PROFIBUS OLM的冗余光纤环网是冗余光纤环网的一种特殊情形,可以通过下列两个组态来实现。
组态 1:
_opt_redundater_ring_2_olms_t1_01_e.gif)
图 1: 冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH3, OLM2/CH2 => LWL2 => OLM1/CH3
组态 2:
_opt_redundater_ring_2_olms_t1_02_e.gif)
图 2:冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH2, OLM2/CH3 => LWL2 => OLM1/CH3
关于如何建立冗余光纤环网的提示:
冗余光纤环网中的LED显示特性:
从任何信道收到的消息被传送到其它所有信道。如果在光信道接收到消息,那么该消息也作为“回波”被送到该信道的发送器,并且作为一个监测消息来检查OLM之间的光纤段。
OLM识别接收到的消息是回波还是传送的消息。如果是回波消息,信道的LED将保持熄灭。如果是传送的消息,信道的LED将点亮黄灯。在多于两个OLM的网络中,回波信号和传送的信号紧 紧相连。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
在冗余光纤环网中,相似的LED显示特性仅在下列情况下发生:
1. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度不同(差异> 大约2米)
在此条件下,接收OLM是首先收到较短光纤连接的发送消息。该信道将点亮黄色信道LED来表明这种情况。在另一光信道的信号则被认为是“回波信号”,而其信道LED将保持 熄灭。由于连接的光纤长度是不变的,因此显示特性也是保持不变。
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮黄灯 | CH2 | LED = 不亮 |
| CH3 | LED = 不亮 | CH3 | LED = 点亮黄灯 |
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮红灯 | CH2 | LED = 点亮黄灯 |
| CH3 | LED = 点亮黄灯 | CH3 | LED = 点亮红灯 |
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮黄灯 | CH2 | LED = 点亮红灯 |
| CH3 | LED = 点亮红灯 | CH3 | LED = 点亮黄灯 |
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮黄灯 | CH2 | LED = 点亮黄灯 |
| CH3 | LED = 不亮 | CH3 | LED = 不亮 |
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮红灯 | CH2 | LED = 点亮红灯 |
| CH3 | LED = 点亮黄灯 | CH3 | LED = 点亮黄灯 |
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| CH2 | LED = 点亮黄灯 | CH2 | LED = 点亮黄灯 |
| CH3 | LED = 点亮红灯 | CH3 | LED = 点亮红灯 |
2. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度也恰好相等
在此调经爱女下,接收OLM同时接收到两个光线信道的消息。为了控制这种情况,OLM为这两个光信道分配优先级别。通过定义,将一个光信道的消息作为回波(信道LED = 关闭),另一个光信道的消息作为传送的消息(信道LED = 黄色)。
由于两个光接收信道之间的抖动影响和扫描的差异,或许会有两个光信道轮流首先收到消息的情况。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
| OLM 1 | OLM 2 | ||
| 系统 | LED = 点亮绿灯 | 系统 | LED = 点亮绿灯 |
| CH1 | LED = 点亮黄灯 | CH1 | LED = 点亮黄灯 |
| (持续点亮,闪烁,闪烁) | (持续点亮,闪烁,闪烁) | ||
| CH2 | LED = 点亮黄灯 | CH2 | LED = 点亮黄灯 |
| (持续点亮,闪烁,闪烁) | (持续点亮,闪烁,闪烁) | ||
| CH3 | LED = 点亮黄灯 | CH3 | LED = 点亮黄灯 |
| (持续点亮,闪烁,闪烁) | (持续点亮,闪烁,闪烁) | ||
结:
不管信道LED是否点亮,冗余光纤环网中的所有光纤信道都被连续的监控。在信道LED没有点亮的情况下,该光纤信道中的消息是用来监测传送的长度。生产性的通信是通过LED点亮黄灯的那个信道进行的。
错误是通过信道LED点亮红灯和警报 连接的形式发出通知信号的。连接警报连接以确保OLM的可靠监测。

我们定义了以下监视情况:
情况 1:当机器人在站 1 工作时,操作员可以在站 2 进行加载或卸载。
情况 2:当机器人在站 2 工作时,操作员可以在站 1 进行加载或卸载。

要监视该装配单元,SICK 安全激光扫描仪 S3000 需与故障安全 SIMATIC S7-1500 (F-CPU) 结合使用。
激光扫描仪可根据机器人的位置监视危险区域,并在机器人进入保护区域后关闭其安全 OSSD 输出(输出信号切换装置),从而使 F-CPU 关闭机器人。
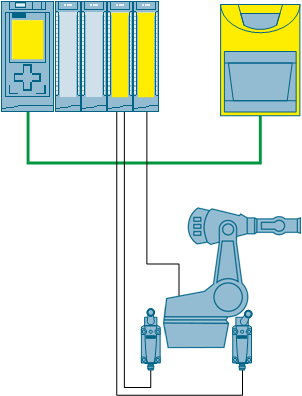
F-CPU 和激光扫描仪可通过 PROFINET 与错误安全“PROFIsafe”配置文件进行通信。可通过两个传感器(例如 SIRIUS 位置开关)来检测机器人位置。
下载
 文档 (1.0 MB)
文档 (1.0 MB)

 TIA Portal V13 SP1 的项目示例,SICK S3000 的配置文件 (12.8 MB)
TIA Portal V13 SP1 的项目示例,SICK S3000 的配置文件 (12.8 MB)
归档
用于 S7-300 和 TIA Portal V11 的文档 V1.0 (1.4 MB)
用于 S7-300 和 TIA Portal V11 的项目示例 V1.0 (2.3 MB)
SICK S3000 的配置文件 V1.0 (7.5 KB)
3RW4455-2BC36
3RW4465-2BC36
3RW2920-1BC08
3RW4426-1BC44
3RW4466-6BC44
3RW2920-1DA00
3RW4426-1BC34
3RW4466-6BC34
3RW2920-2AD00
3RW4426-3BC44
3RW4466-2BC44
3RW2920-2AE00
3RW4426-3BC34
3RW4466-2BC34
3RW2920-2AH00
3RW4426-1BC45
3RW4466-6BC45
3RW2920-2AJ00
3RW4426-1BC35
3RW4466-6BC35
功能性
紧凑型 SIRIUS 3RW30 软起动器所需的空间仅为用于比较额定值 wye-delta 起动的接触器所需空间的三分。这不仅节约了控制柜和标准安装导轨的空间,还完全省去了 wye-delta 起动器所需的布线工作。这对于高电机额定值尤为明显,这些高额定值极少用作高技术解决方案。
同时,连接起动器和电机所需的电缆从六根减少到三根。紧凑的外形尺寸、短起动时间、简单布线和快速调试使得软起动器具有明显的成本优势。
这些软起动器的旁通触点在工作时由一个集成固态灭弧系统保护。从而在故障时可防止对旁通触点的破坏,如线圈操作机构或主操作弹簧的短暂的控制电压故障、机械震动或与寿命相关的部件缺陷。
新设备系列采用“极性平衡”控制方法,用于保护两相控制的软起动器中的直流部件。对于两相控制软起动器,来自两个控制相位重叠的电流会流经未受控制的相位。这也是导致电机软起动中三相电流非对称分布的物理原因。这虽然不受影响,但在大多数应用中仍不可忽视。
采购电话: 田敏
控制功率半导体不仅导致不对称,在起动电压低于电机起动电压值的 50 % 时,还导致之前提到的直流部件产生严重的噪音。用于这些软起动器的控制方法省去了软起动相位的直流部件,并防止了可能产生的制动扭矩。
该方法创建了在速度、扭矩和电流上升上一致的电机软起动,从而可实现电机的缓和两相起动。同时,起动操作的声音质量与三相控制软起动器接近。可通过电机软起动期间不同极性半波电流的持续的动态协调和均衡来实现。因此命名为“极性平衡”。
电压斜坡软起动;起动电压的调节范围 Us 为 40% 至 ,斜坡时间 tR 为 0s ~ 20s。
集成式旁通接触系统,可小化功率损失
使用两个电位计设置
安装与调试简单
电源电压为 50/60 Hz,200 ~ 480 V
两个控制电压型号 24 V AC/DC 和 110 - 230 V AC/DC
宽温度范围,从 -25 ~ +60 ℃
内置辅助触点确保用户友好控制,并可在系统内进一步处理。
西门子3RW30软起动器3RW3038-1BB04SIRIUS 软起动器-S2规格、72A、温度40°C时的值为37KW/400V、交流200-480V、交流/直流24V、螺钉接线端子3RW3038-1BB14SIRIUS 软起动器-S2规格、72A、温度40°C时的值为37KW/400V、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3038-2BB04SIRIUS 软起动器-S2规格、72A、温度40°C时的值为37KW/400V、交流200-480V、交流/直流24V、弹簧接线端子3RW3038-2BB14SIRIUS 软起动器-S2规格、72A、温度40°C时的值为37KW/400V、交流200-480V、交流/直流110-230V、弹簧接线端子3RW3046-1BB04SIRIUS 软起动器-S3规格、80A、温度40°C时的值为45KW/400V、交流200-480V、交流/直流24V、螺钉接线端子3RW3046-1BB14SIRIUS 软起动器-S3规格、80A、温度40°C时的值为45KW/400V、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3046-2BB04SIRIUS 软起动器-S3规格、80A、温度40°C时的值为45KW/400V、交流200-480V、交流/直流24V、弹簧接线端子3RW3046-2BB14采购电话: 田敏
