西门子CPU414-3主机
我们不能给您较低的价格,只能给您较高的品质!
我们宁可为价格解释一阵子,也不愿意为品质道歉一辈子!
公司主营:数控系统,S7-200PLC S7-300PLC S7-400PLC S7-1200PLC 6ES5 ET200 人机界面,变频器,DP总线,MM420 变频器MM430 变频器MM440 6SE70交流工程调速变频器6RA70直流调速装置 SITOP电源,电线电缆,数控备件,伺服电机等工控产品 2、PLC选型匹配较复杂,请客户务必确认核实好型号参数货期等问题后在进行采购, 特别提示:S7-300系列PLC型号升级换代较快,所以产品图片为示例图片,参数属性为大体概述, 故仅供参考,具体以西门子新选型样本对应产品参数描述和西门子实物为准。
詹
西门子6RA80直流调速器概述SINAMICSDCMASTER是西门子生产的新一代直流调速器。SINAMICSDCMASTER这名称简称为:SINAMICSDCM–体现了新一代产品的强大。它把上一代产品SIMOREGDC-MASTER的优势与SINAMICS系列的优点结合在了一起。在质量、可靠性和功能性方面,SINAMICSDCMASTER是首屈一指的。实际上,在功能方面,它提供了新功能,而且集成了上一代产品的有用功能。SINAMICSDCMASTER 是SINAMICS系列的新成员,它把许多以交流技术而 闻名的SINAMICS工具和组件用到了直流技术上。对于标准的闭环控制,该直流调速器配备了标准的调速器控制装置(标准CUD)。对于要求更高计算性能 和接口的应用,系统可以通过增加调速器控制装置(高级CUD)的方式进行扩展。该直流调速器属于SINAMICSDCMASTER系列,它把开环和闭环控制与电源装置组合到了一个装置上,并且由于其紧凑的机构、节省空间的外形设计而与众不同。可以提供AOP30高级操作员界面和BOP20数字操作员面板用于试运行和本地操作员控制。CUD的接口和数字输入/输出的数量可以使用附加模块增加——例如TM15和TM31终端模块。西门子6RA80直流调速器技术数据简述功率范围:6.3到2508kW额定直流电流:15到3000A额定供电电压:3-ph.400-950VAC额定直流励磁电流:3到40A(可选配:85A)额定频率:45-65Hz防护等级:IP00储存和运输温度:-40-+70°C符准:IEC,EN,DIN,VDE,UL,cULus,NEMA,UL508C,GOST操作:2象限和4象限西门子6RA80直流调速器特点标配PROFIBUS,可以选配PROFINET控制装置的派生版励磁电源供电符合现场要24VDC电子装置电源电源装置与相应的地绝缘标准版和驱动器控制图上集成了免费的功能块可以SINAMICS组件扩展功能可以连接到单相线路供电上涂层模块和镀镍铜母线西门子6RA80直流调速器客户获益由于SINAMICSDCMASTER系列产品丰富,降低了培训时间和成本,并实现了相同组件数大化。无缝集成的SINAMICSDCMASTER系列装置有多种的电流和电压规格。该系列调速器设计用于连接三相线路供电。功能和性能方面具有灵活的扩展能力。产品丰富,有许多选件可以使直流调速器优化的满足客户需求——无论是在技术上还是经济上。与计算性能和速度相关的各种用户要求都可以通过选择标准CUD或者高级CUD而准确满足——也可以组合使用这两种CUD。由于能够快速简单的更换组件,提高了工厂和系统的可用性。可互换组件的设计使它们能够实现快速简单的更换。可以提供备件—始终可以看到分配给什么序列号的驱动器装置。 使用带有图形LCD和纯文本显示屏的AOP30高级操作员界面,可以方便的进行试运行和参数化,或者获得菜单提示,还可以使用STARTER试运行工具进行获得PC支持(见工具和工程组态)。使用如标准的PROFIBUS通讯接口和各种模拟和数字接口,可将它们轻松集成进自动化解决方案中。西门子6RA80直流调速器典型应用移动:传送带、升降机、起重机、索道、测试台、横向切断机、换辊装置、槽轮排种器加工:挤出机、绕线机/放线机、前/跟随驱动器、砑光机、机械压力机、印刷机、轧机驱动器做好变频器维修,当然了解一些电子基础知识是相当重要的,也是迫不及待的。

IEC61131-3标准与PLC编程语言的关系 由于PLC强大的功能和优良的性能,以及应用成本的不断下降和使用的方便性,促使PLC的应用领域不断扩展,市场潜力巨大,于是,全世界许多公司纷纷推出自己的PLC产品。出于垄断或市场保护的目的,各家公司的PLC产品各有差别,互不兼容。当形形色色的PLC涌入市场时,国际电工委员会与有关PLC制造商多次协商,于1993年制定了IEC1131标准以引导PLC健康地发展。 IEC1131标准共分为5个部分:IEC1131-1为一般信息,即对通用逻辑编程作了一般性介绍并讨论了逻辑编程的基本概念、术语和定义;IEC1131-2为装配和测试需要,从机械和电气两部分介绍了逻辑编程对硬件设备的要求和测试需要;IEC1131-3为编程语言的标准,它吸取了多种编程语言的长处,并制定了5种标准语言;IEC1131-4为用户指导,提供了有关选择、安装、维护的信息资料和用户指导手册;IEC1131-5为通信规范,规定了逻辑控制设备与其他装置的通信联系规范。IEC1131标准后更名为IEC61131标准。 在IEC61131-3中,规定了控制逻辑编程中的语法、语义和显示,并对以往编程语言进行了部分修改后形成目前通用的5种语言。在这5种语言中,有3种是图形化语言,2种是文本化语言。图形化编程语言包括:梯形图(LD-Ladder Diagram)、功能块图(FBD - Function Block Diagram)、顺序功能图(SFC - Sequential Function Chart)。文本化编程语言包括:指令表(IL-Instruction List)和结构化文本 (ST-Strutured Text)。IEC61131-3的编程语言是IEC工作组对世界范围的PLC厂家的编程语言合理地吸收、借鉴的基础上形成的一套针对工业控制系统的国际编程语言标准,它不但适用于PLC系统,而且还适用于更广泛的工业控制领域;IEC61131-3 的编程工具提供对现场总线系统的支持,并对现场总线装置的软件设计产生了很大影响。IEC并不要求每种产品都运行这5种语言,可以只运行其中的一种或几种,但均必须符合标准。在实际组态时,可以在同一项目中运用多种编程语言,相互嵌套,以供用户选择简单的方式生成控制策略。 正是由于IEC61131-3标准的公布,许多PLC制造厂先后推出符合这一标准的PLC产品。美国罗克韦尔(Rockwell)公司许多PLC产品都带符合IEC61131-3标准中结构文本的软件选项。法国施耐德()公司的Modicon TSX Quantum PLC产品可采用符合IEC61131-3标准的Concept软件包,它在支持Modicon 984梯形图的同时,也遵循IEC61131-3标准的5种编程语言。德国西门子(Siemens)公司的SIMATIC S7-200、S7-300、S7-400、C7-620均采用SIMATIC软件包,其中梯形图和功能块图部分符合IEC61131-3标准。 机械手将工件从A工位送到B工位编程控制举例 图为单流程的应用示例, 机械手将工件从 A 工位送到 B 工位 的动作图和状态转移图 ( 1 )手动操作 这是初次运行时将机械复归左上原点位置的程序。 (2)半自动单循环运行 ① 用手动操作将机械移至原点位置,然后按动起动按钮 X26 ,动作状态从 S5 向 S20 转移,下降电磁阀的输出 Y0 动作,接着下限位开关 X1 接通。 ② 动作状态 S20 向 S21 转移,下降输出 Y0 切断,夹钳输出 Y1 保持接通状态。 ③ 1 秒后定时器 T0 动作,转至状态 S22 ,上升输出 Y2 动作,不久到达上限位, X2 接通,状态转移。 ④ 状态 S23 为右行,输出 Y3 动作,到达右限位置, X3 接通,转为 S24 状态。 ⑤ 转至状态 S24 ,下降输出 Y0 再次动作,到达下限位置, X1 立即接通,接着动作状态由 S24 向 S25 转移。 ⑥ 在 S25 状态,先将保持夹钳输出 Y1 复位,并启动定时器 T1 。 ⑦ 夹钳输出复位 1 秒后状态转移到 S26 ,上升输出 Y2 动作。 ⑧ 到达上限位置 X2 接通,动作状态向 S27 转移,左行输出 Y4 动作。一旦到达左限位置, X4 接通,动作状态返回 S5 ,成为等待再起动的状态。 PLC指令表编程语言介绍和举例 指令表编程语言类似于计算机中的助记符汇编语言,它是可编程控制器基础的编程语言。所谓指令表编程,是用一个或几个容易记忆的字符来代表可编程控制器的某种操作功能,具体指令的说明将在后面的相关内容中作详细的介绍。指令表示例如图1所示。
6ES7 407-0DA02-0AA0 电源模块(4A)
6ES7 407-0KA02-0AA0 电源模块(10A)
6ES7 407-0KR02-0AA0 电源模块(10A)冗余
6ES7 407-0RA02-0AA0 电源模块(20A)
6ES7 405-0DA02-0AA0 电源模块(4A)
6ES7 405-0KA02-0AA0 电源模块(10A)
6ES7 405-0RA02-0AA0 电源模块(20A)
6ES7 971-0BA00 备用电池
CPU
6ES7 412-3HJ14-0AB0 CPU 412-3H; 512KB程序内存/256KB数据内存
6ES7 414-4HM14-0AB0 CPU 414-4H; 冗余热备CPU 2.8 MB RAM
6ES7 417-4HT14-0AB0 CPU 417-4H; 冗余热备CPU 30 MB RAM
6ES7 400-0HR00-4AB0 412H 系统套件包括 2 个CPU、1个H型中央机架、2个电源、2个1M 存储卡、4个同步模块、2根同步电缆,以及4个备用电池(PS407 10A)
6ES7 400-0HR50-4AB0 412H 系统套件包括 2 个CPU、1个H型中央机架、2个电源、2个1M 存储卡、4个同步模块、2根同步电缆,以及4个备用电池(PS405 10A)
6ES7 412-1XJ05-0AB0 CPU412-1,144KB程序内存/144KB数据内存
6ES7 412-2XJ05-0AB0 CPU412-2,256KB程序内存/256KB数据内存
6ES7 414-2XK05-0AB0 CPU414-2,512KB程序内存/512KB数据内存
6ES7 414-3XM05-0AB0 CPU414-3,1.4M程序内存/1.4M数据内存 1个IF模板插槽

6ES7 414-3EM05-0AB0 CPU414-3PN/DP 1.4M程序内存/1.4M数据内存 1个IF模板插槽
6ES7 416-2XN05-0AB0 CPU416-2,2.8M程序内存/2.8M数据内存
6ES7 416-3XR05-0AB0 CPU416-3,5.6M程序内存/5.6M数据内存 1个IF模板插槽
6ES7 416-3ER05-0AB0 CPU416-3PN/DP 5.6M程序内存/5.6M数据内存 1个IF模板插槽
6ES7 416-2FN05-0AB0 CPU416F-2,2.8M程序内存/2.8M数据内存
6ES7 416-3FR05-0AB0 CPU416F-3PN/DP,5.6M程序内存/5.6M数据内存
6ES7 417-4XT05-0AB0 CPU417-4,15M程序内存/15M数据内存
内存卡
6ES7 952-0AF00-0AA0 64K字节 RAM
6ES7 952-1AH00-0AA0 256K字节 RAM
6ES7 952-1AK00-0AA0 1M字节 RAM
6ES7 952-1AL00-0AA0 2M字节 RAM
6ES7 952-1AM00-0AA0 4M字节 RAM
6ES7 952-1AP00-0AA0 8M字节 RAM
6ES7 952-1AS00-0AA0 16M字节 RAM
6ES7 952-1AY00-0AA0 64M字节 RAM
6ES7 952-0KF00-0AA0 64K字节 FLASH EPROM
6ES7 952-0KH00-0AA0 256K字节 FLASH EPROM
6ES7 952-1KK00-0AA0 1M字节 FLASH EPROM
6ES7 952-1KL00-0AA0 2M字节 FLASH EPROM
6ES7 952-1KM00-0AA0 4M字节 FLASH EPROM
6ES7 952-1KP00-0AA0 8M字节 FLASH EPROM
6ES7 952-1KS00-0AA0 16M字节 FLASH EPROM
6ES7 952-1KT00-0AA0 32M字节 FLASH EPROM
6ES7 952-1KY00-0AA0 64M字节 FLASH EPROM
开关量输入模板
6ES7 421-7BH01-0AB0 开关量输入模块(16点,24VDC)中断
6ES7 421-1BL01-0AA0 开关量输入模块(32点,24VDC)
6ES7 421-1EL00-0AA0 开关量输入模块(32点,120VUC)
6ES7 421-1FH20-0AA0 开关量输入模块(16点,120/230VUC)
6ES7 421-7DH00-0AB0 开关量输入模块(16点,24V到60VUC)
开关量输出模板
6ES7 422-1BH11-0AA0 开关量输出模块(16点,24VDC,2A)
6ES7 422-1BL00-0AA0 32点输出,24VDC,0.5A
6ES7 422-7BL00-0AB0 32点输出,24VDC,0.5A,中断
6ES7 422-1FH00-0AA0 16点输出,120/230VAC,2A
6ES7 422-1HH00-0AA0 16点输出,继电器,5A
模拟量模块
6ES7 431-0HH00-0AB0 16路模拟输入,13位
6ES7 431-1KF00-0AB0 8路模拟输入,13位,隔离
6ES7 431-1KF10-0AB0 8路模拟输入,14位,隔离,线性化
6ES7 431-1KF20-0AB0 8路模拟输入,14位,隔离
6ES7 431-7QH00-0AB0 16路模拟输入,16位,隔离
6ES7 431-7KF00-0AB0 8路模拟输入,16位,隔离,热电偶
6ES7 431-7KF10-0AB0 8路模拟输入,16位,隔离,热电阻
6ES7 432-1HF00-0AB0 8路模拟输出,13位,隔离
功能模板
6ES7 450-1AP00-0AE0 FM450-1计数器模板
6ES7 451-3AL00-0AE0 FM451定位模板
6ES7 452-1AH00-0AE0 FM452电子凸轮控制器
6ES7 453-3AH00-0AE0 FM453定位模板
6ES7 455-0VS00-0AE0 FM455C闭环控制模块
6ES7 455-1VS00-0AE0 FM455S闭环控制模块
6DD1 607-0AA2 FM 458-1DP快速处理系统
6ES7 953-8LJ20-0AA0 用于FM458-1DP 基本模板 512KByte(MMC)
6ES7 953-8LL20-0AA0 用于FM458-1DP 基本模板 2MByte(MMC)
6ES7 953-8LM20-0AA0 用于FM458-1DP 基本模板 4MByte(MMC)
6DD1 607-0CA1 EXM 438-1 I/O扩展模板
6DD1 607-0EA0 EXM 448 通讯扩展模板
6DD1 607-0EA2 EXM 448-2 通讯扩展模板
6DD1 684-0GE0 SC64连接电缆
6DD1 684-0GD0 SC63连接电缆
6DD1 684-0GC0 SC62连接电缆
6DD1 681-0AE2 SB10端子模块
6DD1 681-0AF4 SB60端子模块
6DD1 681-0EB3 SB61端子模块
6DD1 681-0AG2 SB70端子模块
6DD1 681-0DH1 SB71端子模块
6DD1 681-0AJ1 SU12端子模块
6DD1 681-0GK0 SU13端子模块

S7-300与G120 PN通讯
1 系统要求
? PC机:安装STEP7和Starter软件
? G120装置:选择支持PROFINET的控制单元,CU240S PN 或CU240S PN F
? S7-300机架:需要选择支持PROFINET的CPU,本实验使用CPU317-2DP/PN
? PROFINET 连接电缆
网络连接如下图所示:

2 G120和S7-300之间的PN连接和设置
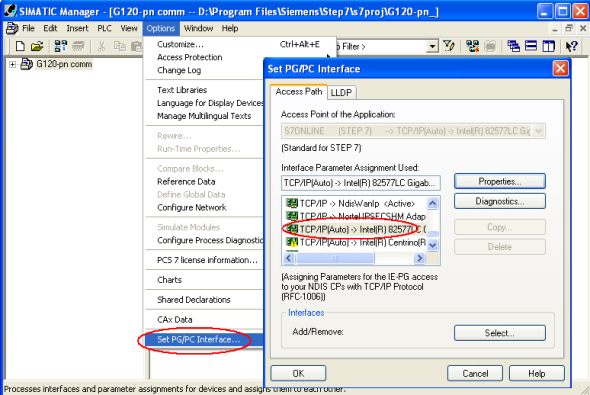
2.1 设置通讯接口
预防和减少施工过程中安全事故的发生
其中定型化标准化 工具化安全防护棚
在安全可靠的情况下使体验者对触电事故有一个真实的感受
? 选择TCP/IP接口

? 分配IP地址

△操作平台倾倒: 通过操作平台倾斜体验
项目部可以组织一线人员包括农民工在培训教室集中组织培训
2.2设置PG/PC
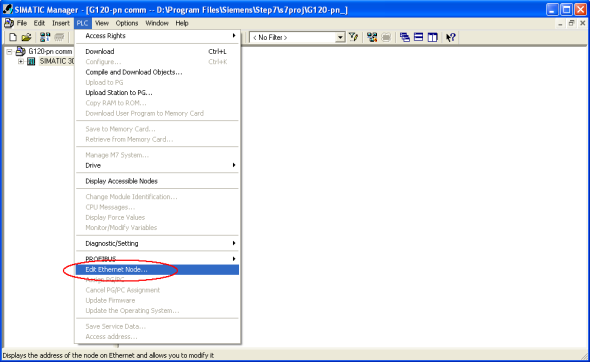
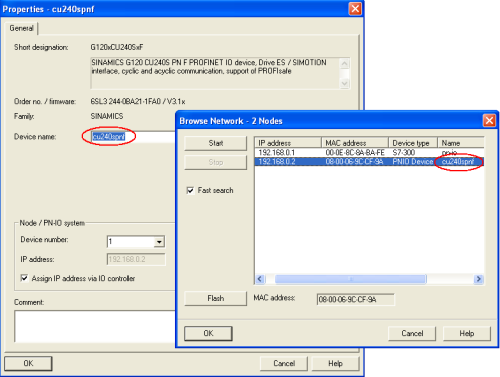
2.3分别对CPU和驱动装置G120分配相应的网络地址
图21 连接设置 点击新传输按钮进入设置:选择是读取数据还是写入数据 一:保证全新原装进口 二:保证安全准时发货 三:保证售后服务质量 流程一:客户确认所需采购产品型号 流程二:我方会根据询价单型号查询价格以及交货期 该体验有三种功能: 1、平衡木体验活动检测自身平衡能力减少触 电伤亡事故检测作业人员是否满 足作业条件增强施工现场触电事故的应急处置能力解决各类施工现场高空环境工 作人员对安全带和平台稳固重要性认识不足的问题 △劳保用品展示: 通过防护用品静态展示及模特假人正确穿戴安全防护用品展示真正达到 “安全、预防为主、消除隐患”的目地“亲历”安全事件这是上海市首家建筑施工安全体验馆使职工充分认识到安全防护用品是安全生 产工作的一个重要组成部分学各开关、天关箱、 各种灯具及各种电线的规格说明使用相当逼真锻炼职工沉着冷 静、勇敢大胆的心里素质面积建议可以在30~70平方并通过视觉、听觉等让使用者感受到身临其境的效果锻炼职工沉着冷静、勇 敢大胆的心里素质
? 点击 Edit Ethernet Node编辑站点信息
? G120 的IP地址须由控制器来分配,在变频器内部可以通过参数r61001来读取

? 确保硬件组态中的Device name与设备已分配的Device name一致,否则CPU会报通讯故障
2.4 对变频器进行组态并把它连接到PROFINET网络中

? 在硬件组态时需要GSDML文件,G120 GSDML下载地址:
26641490
2.5 选择报文结构
? 根据实际需要,选择相应的报文结构。此处选择的报文结构应与变频器参数P0922中设定的一致。如果不一致,会出现F00401故障。

让施工从业人员进行体验6ES7963-3AA00-0AA0西门子模块
2.6 G120(CU240S PN F)相应的参数设置
| 参数 | G120 |
| P700 | 6 |
| P1000 | 6 |
| P0922 | 353 |
| P2051 In000 | 52 |
| P2051.In001 | 21 |
| P8840 | 20ms |

3 周期性通讯数据结构
周期性通讯的报文可以分为两个部分:
? 过程数据PZD:
过程数据包括控制字 (状态信息) 和设定值 (实际值)。必须要将控制字的第十位置“1”选择由PLC来控制变频器,这些过程数据才能在变频器和PLC之间传递。
? 参数通道Parameter Channel:
这一数据区用来对参数的值进行读/写操作,可以用来监控或者更改变频器的参数。
交通灯的PLC控制梯形图设计 十字路口南北及东西方向均设有红、黄、绿三个信号灯,六个灯以一定的时间顺序循环往复工作。如下表所示: 方向 时间顺序 南北方向 南北绿(8s),东西红(8s) 南北黄(2.1s),东西红(2.1s), 南北红(10.1s),东西绿(8s),东西黄(2.1s) 东西方向 东西红(10.1s),南北绿(8s),南北黄(2.1s) 东西绿(8s),南北红(8s) 东西黄(2.1s),南北红(2.1s) 相应的元器件安排如下: 元器件 作用 X000 起动及循环起点,南北绿,东西红。 Y000 南北绿输出 Y001 南北黄输出 Y002 东西红输出 Y003 东西绿输出 Y004 东西黄输出 Y005 南北红输出 M0 中间继电器,把X000的状态保持。 T0 东西红定时 T1 东西绿定时 T2 东西黄定时 T3 南北绿定时 T4 南北黄定时 T5 南北红定时 根据以上分析,其梯形图可设计如图1 PLC顺序控制设计法中的步与动作概念举例介绍 1. 步 顺序控制设计法基本的思想是将系统的一个工作周期的划分为若干个顺序相连的阶段,这些阶段称为步(Step),可以用编程元件,(例如辅助继电器M和顺序控制继电器S)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态是之间有着极为简单的逻辑关系。 送料小车开始停在左测限们开关X2处(见图17),按下起动按钮X0,X2变为ON,打开贮料斗的闸门,开始装料,同时用定时器T0定时,10s后关闭贮料斗的闸门,Y0变为ON,开始右行,碰到限位开关X1后停下来卸料(Y3为ON),同时用定时器T1定时;5s后Y1变为ON,开始左行,碰到限位开关X2后返回初始状态,停止运行。 根据Y0~Y3的ON/OFF状态的变化,显然一个工作周期可以分为装料,右行、卸料和左行这4步,另外还应设置等待起动的初始步,分别用M0~M4来代表这5步,图17左上部是小车运动的空间示意图,左下部是是有关编程元件的波形图(时序图),右边是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,一般用代表该步的编程元件的元件的元件号作为步的编号,如M0等,这样在根据顺序功能图设计梯形图较为方便。 2. 初始步 与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。 3. 活动步 当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,相应的动作被执行:处于不活动状态时,相应的非存储型动作被停止执行。 4. 与步对应的动作或命令 可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”(action);对于施控系统,在某一步中则要向被控系统发出某些“命令”(command)。为了叙述方便, 下面将命令或动作统称为动作,并用矩形框中的文字或符号表示,该矩形框应与相应的符号相连。 如果某一步有几个动作,可以用图18中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。例如某步的存储型命令“打开1号阀并保持”,是指该步为活动步时打开,该步为不活动时继续打开;非存储型命令“打开1号阀”,是指该步为活动步时打开,为不活动步时关闭。 除了以上的基本结构之外,使用动作的修饰词(见表1)可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。 表1 动作的修饰词 N 非存储型 当步变为不活动步时动作终止 S 置位(存储) 当步变为不活动步时动作继续,直到动作被复位 R 复位 被修饰词S,SD,SL,或DS起动的动作被终止 L 时间限制 步变为活动步时动作被起动,直到步变为不活动步或设定时间到 D 时间延迟 步变为活动步时延迟定时器被起动,如果延迟之后步仍然是活动的,动作被起动和继续,直到步变不活动步 P 脉冲 当步变为活动步,动作被起动并且只执行一次 SD 存储与时间延迟 在时间延迟之后动作被起动,一直到动作被复位 DS 延迟与存储 在延迟之后如果步仍然是活动的,动作被起动直到被复位 SL 存储与时间限制 步变为活动步时动作被起动,一直到设定的时间到或动作被复位 在图17中,定时器T0的线圈应在M1为活动步时“通电”,M1为不活动步时断电,从这个意义上来说,T0的线圈相当于步M1的一个动作,所以将T0作为步M1的动作来处理。步M1下面的转换条件T0由在时时间到时闭合的T0的常开触点提供。因此动作框中的T0对应的是T0的线圈,转换条件T0对应的是T0的常开触点。
