西门子6ES7222-1BD22-0XA0
上海施承电气自动化有限公司
保证所售产品均为原装全新未拆封质保一年 罚十(满三千顺丰包邮)
保证对所售每一件产品负责到底,即使过保我们也继续提供对应的服务,让您没有后顾之忧.
保证签订合同款项落实以后一定按照合同上的约定准时准量的把产品送到您的手上.
保证客户拿到的每一件产品都是从西门子正规渠道提供货物,罚十.
公司只要代理的西门子的系列有:PLC S7-200,PLC S7-300,PLC S7-400,PLC S7-1200,PLC 6ES5, ET200 ,人机界面,屏,变频器,DP总线,电缆,M系列变频器 V系列变频器 G系列变频器 6SE70交流工程调速变频器,6RA70直流调速装置,SITOP电源,电线电缆,数控备件,数控,伺服电机等工控自动化产品的销售及.如有需要可以使用提供的任何一种联系购买.
西门子6ES7222-1BD22-0XA0
S7-200 可编程序控制器手册通过位控向导创建指令通过 创建 五 个 唯 一的指令子程序,位控 向导 使得控制内置 PTO 更 加 容易 。每个位控指令 都 包含前 缀 “ PTO x _ ” ,其中 x 表示通 道编 号 (x=0 时为 Q0.0 , x=1 时为 Q0.1) 。USS_CTRL 子程序PTOx_CTRL 子程序 ( 控制 ) 使能和 初 始 化 用于 步 进 电机 或 伺服 电机 的 PTO 输出。在 您 的程序中 仅 能使用 该 子程序一次,并保 证 每个 扫 描周期 该 子程序 都 被执行。一直使用 SM0.0 作为 EN 输 入的输入。I_STOP ( 立即 STOP) 输入量为一个布尔量输入。当输入为 低 电平 时, PTO 功能 正常操 作。当输入变为 高电平 时, PTO 立即 终止脉冲输出。D_STOP ( 减 速 STOP) 输入量为一个布尔量输入。当输入为 低 电平 时, PTO 功能 正常操 作。当输入变为 高电平 时, PTO 产生 一个脉冲 串 将 电机 减 速 到停止。Done 输出是一个布尔量输出。当 Done 位为 高电平 时,表 明 CPU 已 经执行完子程序。当 Done 位为 高电平 时, Error 字节以一个无 错误 代 码 或 错误 代 码来报告 是否 正常 完成。对于 错误 代 码 的定义, 见 表 9--7 。若 在 向导 中 已 启用 HSC , 则 C_Pos 参数包含以脉冲数表示的 模 块当前位置。否 则 ,当前位置将一直 为 0 。表 9--OSx_CTRL 指令的参数260输入 / 输出I_STOPD_STOP Done ErrorC_Pos数据类型BOOL BOOL BOOL BYTEDWORD操作数I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 L 、 功率流 I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 L 、 功率流 I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 LIB 、 QB 、 VB 、 MB 、 SMB 、 SB 、 LB 、 AC 、 *VD 、 *AC 、 *LD ID 、 QD 、 VD 、 MD 、 SMD 、 SD 、 LD 、 AC 、 *VD 、 *AC 、 *LD274

乾老魔眼见自己刚刚困,诸多攻击又紧追不舍的再次攻来,声势甚至还远上次。神雷击在此只传出一声闷响就化为一股诡异绿烟袅袅升空。而乾老魔却已身形滴溜溜地一转。五股灰白气柱在四周豁然冒出。五个身高两丈。削嶙嶙人形骨架。在魔气中现形而出。它们个个体形高大。骨骼晶莹如玉。浑身散着丝丝地寒气。
S7-200 开 环 运 动 控制第 9 章PTOx_RUN 子程序PTOx_RUN 子程序 ( 运 行包 络 ) 命令 PLC 在一个的包 络 中执 行 运 动 操 作,此包 络 存储在 组态 / 包 络 表中。接通 EN 位,使能 该 子程序。 确 保 EN 位保持接通,直 至 Done 位 指示 该 子程序 已 完成。接通 START 参数以 初 始 化 包 络 的执行。对于每次 扫 描,当 START 参数接通且 PTO 当前 未 时,指令 PTO 。要保 证 该 命令 只 发一次,使用 边 沿 检 测 指令以脉冲触发 START 参数 接通。包 络 参数包含 该 移 动包 络 的号 码 或符号名。接通参数 Abort ,命令位控 模 块停止当前的包 络 并 减 速 直 至电 机 停下。模 块完成 该 指令时,参数 Done 接通。参数 Error 包含指令的执行结果。有关 错误 代 码 的定义, 请 参 见 表 9--7 。参数 C_Profile 包含位控 模 块当前 正 在执行的包 络 。 参数 C_Step 包含当前 正 在执行的包 络 的 步 。若 在 向导 中 已 启用 HSC , 则 C_Pos 参数包含以脉冲数表示的 模 块当前位置。否 则 ,当前位置将一直 为 0 。表 9--4PTOx_RUN 指令的参数输入 / 输出START ProfileAbort 、 DoneError 、 C_Profile 、C_Step C_Pos数据类型BOOL BYTE BOOL BYTEDINT操作数I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 L 、 功率流IB 、 QB 、 VB 、 MB 、 SMB 、 SB 、 LB 、 AC 、 *VD 、 *AC 、 *LD 、常数 I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 LIB 、 QB 、 VB 、 MB 、 SMB 、 SB 、 LB 、 AC 、 *VD 、 *AC 、 *LDID 、 QD 、 VD 、 MD 、 SMD 、 SD 、 LD 、 AC 、 *VD 、 *AC 、 *LD261275
S7-200 可编程序控制器手册PTOx_MAN 子程序PTOx_MAN 子程序 ( 手 动 模 式 ) 使 PTO 输出置为 手 动 模 式。这可 以使 电机 在 向导 中的 范围 ( 从 启动 / 停止 速 度到 速 度 ) 内 以不同 速 度启动、停止和 运 行。如果启用了 PTOx_MAN 子程 序, 则 不应执行其它 任何 PTOx_RUN 或 PTOx_ADV 指令。 允许 RUN (Run/Stop) 参数,命令 PTO 加 速 到 速 度 ( 速 度参 数 ) 。 即 使在 电机运 行时, 您 也可以 改 变 速 度参数的值。禁止参 数 RUN 则 命令 PTO 减 速 ,直 至电机 停止。参数 Speed 决定 RUN 使能时的 速 度。对于 出 该范围 的Speed 参数值, 速 度将 限 定为启动 / 停止 速 度或 速 度。 速 度 是一个每秒多 少 个脉冲的双 整 型 (DINT) 值。 电机运 行时可以 修 改该速 度参数。参数 Error 包含指令的执行结果。有关 错误 代 码 的定义, 请 参 见 表 9--7 。若 在 向导 中 已 启用 HSC , 则 C_Pos 参数包含以脉冲数表示的 模 块当前位置。否 则 ,当前位置将一直 为 0 。表 9--5PTOx_MAN 指令的参数输入 / 输出RUN速度ErrorC_Pos数据类型BOOL DINTBYTE DINT操作数I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 L 、 功率流ID 、 QD 、 VD 、 MD 、 SMD 、 SD 、 LD 、 AC 、 *VD 、 *AC 、 *LD 、常数 IB 、 QB 、 VB 、 MB 、 SMB 、 SB 、 LB 、 AC 、 *VD 、 *AC 、 *LD ID 、 QD 、 VD 、 MD 、 SMD 、 SD 、 LD 、 AC 、 *VD 、 *AC 、 *LD提示PTO 也 许 不会 响 应 速 度参数小的变 化 , 特 别是如果 组态 的加 速 或 减 速 时间 较 短 并且 速 度和启动 / 停止 速 度 相 差 较 大的 情况 。262276

S7-200 开 环 运 动 控制第 9 章PTOx_LDPOS 指令PTOx_LDPOS 指令 ( 装载 位置 ) 改 变 PTO 脉冲计数器的当前位置 值为一个 新 值。 您 可以使用 该 指令为 任何 一个 运 动命令 建立 一 个 新 的零位置。接通 EN 位使能 该 指令。 确 保 EN 位始终保持接通直到 Done 位指 示指令完成。接通 START 参数,以 装载 一个 新 的位置值到 PTO 脉冲计数器。 每一 循 环 周期, 只 要 START 参数接通且 PTO 当前不 忙 , 该 指令 装载 一个 新 的位置给 PTO 脉冲计数器。要保 证该 命令 只 发一 次,使用 边 沿 检 测 指令以脉冲触发 START 参数接通。New_Pos 参数提供一个 新 的值 替 代 报告 的当前位置值。位置 值用脉冲数表示。模 块完成 该 指令时,参数 Done 接通。参数 Error 包含指令的执行结果。有关 错误 代 码 的定义, 请 参 见 表 9--7 。若 在 向导 中 已 启用 HSC , 则 C_Pos 参数包含以脉冲数表示的 模 块当前位置。否 则 ,当前位置将一直 为 0 。表 9--6PTOx_LDPOS 指令的参数输入 / 输出STARTNew_Pos 、 C_PosDone Error数据类型BOOL DINTBOOL BYTE操作数I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 L 、 功率流ID 、 QD 、 VD 、 MD 、 SMD 、 SD 、 LD 、 AC 、 *VD 、 *AC 、 *LD I 、 Q 、 V 、 M 、 SM 、 S 、 T 、 C 、 LIB 、 QB 、 VB 、 MB 、 SMB 、 SB 、 LB 、 AC 、 *VD 、 *AC 、 *LD263277
S7-200 可编程序控制器手册PTOx_ADV 子程序PTOx_ADV 子程序停止当前的 连 续 运 动包 络 ,并 加 向导 包 络 定义中的脉冲数。当 您 在位控 向导 中了 至少 一个 允许 PTOx_ADV 选项的单 速连 续转动, 则该 子程序被 创建 。PTO 指令的错误代码264表 9--7错误代码0 1 2 3127 128 129 130 132PTO 指令 错误代码描述无 错误 , 正 常 完成在运行中立 即发 出 STOP 指令。 STOP 命 令 完成 在运行中执行 减 速 STOP 命 令。 STOP 命 令 完成 在脉冲 发生 器中 或 PTO 表的 格 式 化 中 检测 到的执行 错误 发生 ENO 错误 。 检 查 PLC 信息以 获取 关于 非 致 命 错误 的 描 述 忙碌 。 已 有其它 PTO 操作在运行立 即 STOP 和 减 速 STOP 命 令 已 同时 启 用,导 致 的 结 果是立 即停止 PTO 指令当前 正被 命 令为 STOP 所请 求 的包 络 编 号 出 范围278
 是至阳道友吗。道友亲自前来迎,韩某愧不敢当。看到这熟悉地遁光,韩立顿时停了下来。远远的传音过去。呵呵,韩道友是守信之人,贫道自然应当远迎了。至阳上人见到韩立似乎很高兴,同样朗朗传声而来。然后白光飞至了韩立身余丈出,光华一敛,显出了道士的身影。韩立微微一笑。冲对面拱了拱手。道友先跟我到洞府一聚。
是至阳道友吗。道友亲自前来迎,韩某愧不敢当。看到这熟悉地遁光,韩立顿时停了下来。远远的传音过去。呵呵,韩道友是守信之人,贫道自然应当远迎了。至阳上人见到韩立似乎很高兴,同样朗朗传声而来。然后白光飞至了韩立身余丈出,光华一敛,显出了道士的身影。韩立微微一笑。冲对面拱了拱手。道友先跟我到洞府一聚。
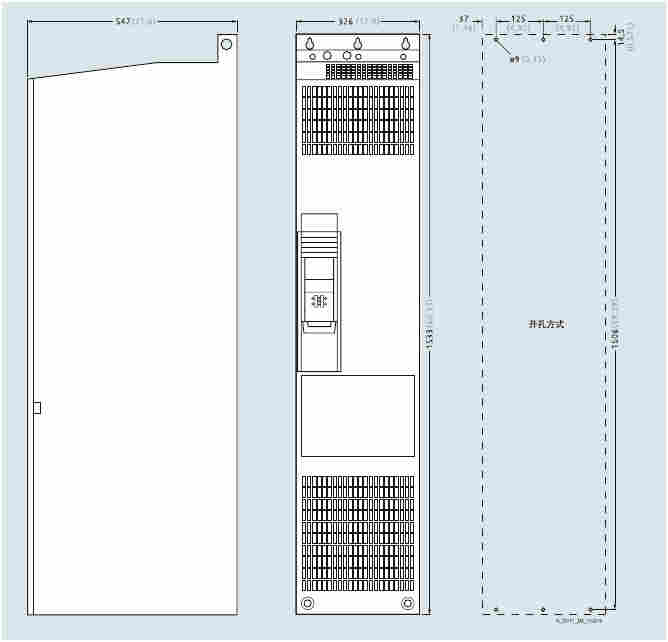
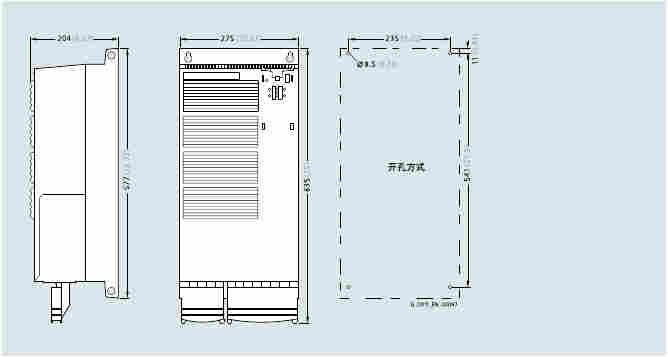
S7-200 开 环 运 动 控制位控模块的特性位控 模 块可为 您 提供单 轴 、开 环 位置控制所 需 要的功能和 性 能。第 9 章- - -- - - ---提供 高速 控制, 速 度 从 每秒 20 个脉冲到每秒 200,000 个脉冲 支 持 急 停 (S 曲线 ) 或 线 性 的加 速 、 减 速 功能 提供可 组态 的 测 量,既可以使用工程单位 ( 如 英寸 或 厘米 ) 也可以使用脉冲数 提供可 组态 的 螺距误 差 补偿支 持 绝 对、 相 对和 手 动的位控 方 式 提供 连 续 操 作提供多达 25 组 的 移 动包 络 ,每 组 多可有 4 种 速 度提供 4 种不同的参 考 点 寻找模 式,每种 模 式 都 可 对 起 始的 寻找方向 和终的接 近 方向 进行选择 提供可 拆 卸 的现 场 接 线 端子 便 于 安装 和 拆 卸 。图 9--9EM253 位控模块使用 STEP 7--Micro/WIN 可生成位控 模 块所使用的 全 部 组态 和 移 动包 络信息 。这些 信息 和 您 的程序块 一 起 下 载 到 S7--200 中。由于位控 模 块所 需 要的 全 部 信息都 存储在 S7--200 中,当 您更换 位控 模 块时不 必重 新编 程或 组态 。S7--200 在输出的 映像 区中 (Q 区 ) 保 留 8 位作为位控 模 块的接 口 。 S7--200 的应用程序将使用这些位 来 控制位控 模 块的 操 作。这 8 个输出位 与 位控 模 块上的 任何 物 理输出 都 不 相连 。位控 模 块提供 5 个数字输入和 4 个数字输出 与您 的 运 动控制应用 相连 ,参 见 9--8 。这些输入输出位于位 控 模 块上。 附录 A 给出了位控 模 块的 详细 规 范 ,另 外 还提供了位控 模 块 与 一些 常 用的 电机 驱 动 / 放大单 元 的接 线 图。表 9--8STP RPS ZPLMT+ LMT-- P0 P1P0+, P0-- P1+, P1-- DISCLR位控模块的输入和输出描述STP 输入可 让 模块 停止 脉冲输出。在位控 向 导中可选择您所 需 要 的 STP 操作。 RPS( 参 考 点 切换 ) 输入可为 绝 对 运 动 操作建立参 考 点 或 零 点位置。ZP( 零 脉冲 ) 输入可 帮助 建立参 考 点 或 零 点位置。通常,电机 驱 动 器 / 放 大器在电机的每一 转 产 生 一个 ZP 脉冲LMT+ 和 LMT-- 是运 动 位置的 大。位控 向 导中可以 组 态 LMT+ 和 LMT-- 输入。P0 和 P1 是 漏 型 晶体 管 输出,用以控制电机的运 动 和方 向 。 P0+ 、 P0-- 以 及 P1+ 、 P1-- 是 差分 脉 冲输出,与 P0 和 P1 的 功 能一 样 , 但 所提供的信 号 质 量 更 好 。 漏 型输出和 差分 输出同时有 效 。 可以 根 据电机 驱 动 器 / 放 大器的接口 要求来 选择使用 哪 种 输出。DIS 是一个 漏 型输出,用 来禁止或 使能电机 驱 动 器 / 放 大器。 CLR 是一个 漏 型输出,用 来 清 除 伺 服脉冲计数器。265279
S7-200 可编程序控制器手册位控模块编程STEP 7--Micro/WIN 为位控 模 块的 组态 和 编 程提供 便捷 的工 具 。 遵 循 以下 步骤即 可:1.2.3.组态 位控 模 块。 STEP 7--Micro/WIN 提供一个位控 向导 ,可生成 组态 / 包 络 表和位控指令。有 关 组态 位控 模 块的 信息 , 请 参 看 第 270 页 上的 组态 位控 模 块。测 试 位控 模 块的 操 作。 STEP 7--Micro/WIN 提供一个 EM253 控制面 板 ,用以 测 试 输入输出的 接 线 、位控 模 块的 组态 以 及 运 动包 络 的 运 行。有关 EM 253 控制面 板 的 信息 , 请 参 看 第 290 页 。 创建 S7--200 的执行程序。位控 向导 自动生成位控指令。 您 可以将这些指令程序中。有关 位控指令的 信息 参 见页 面 273 。将以下指令程序中:--------要使能位控 模 块, 请 一个 POSx_CTRL 指令。用 SM0.0( 始终接通 ) 以 确 保这条指令在 每一个 循 环 周期中 都 执行。要将 电机 移 动到一个位置,使用一条 POSx_GOTO 指令或一条 POSx_RUN 指令。 POSx_GOTO 指令使 电机运 动到 您 在程序中输入的位置。 POSx_RUN 指令 则 使 电机 按照您 在位控 向导 中所 组态 的 路线 运 动。要使用 绝 对 坐 标进行 运 动, 您 必须为 您 的应用 建立 零位置。使用一条 POSx_RSEEK 或一 条 POSx_LDPOS 指令 建立 零位置。位控 向导 生成的其它指令为 典 型应用提供 需 要的功能,对于 您 的 特 定应用,这些指令是 可选的。4.编 译 您 的程序并将块、数据块和程序块下 载 到 S7--200 中。提示关于 连 接位控 模 块到 几 个通用 步 进 电机 控制器的 信息 , 请 参 照附录 A 。提示要 想 与 位控 向导 中的 缺省 设置 相匹配 , 则 将 步 进 电机 控制器上的 DIP 开关设置 至 每转 10,000 个 脉冲。266280
|
Prioritygroup |
Event |
De |
Priorityingroup |
|
|
26 |
Port1Transmitcomplete |
1 |
|
Discrete MediumPriority |
19 |
Reserved |
0 |
|
20 |
Reserved |
1 |
|
|
34 |
Reserved |
2 |
|
|
0 |
I0.0Risingedge |
3 |
|
|
2 |
I0.1Risingedge |
4 |
|
|
4 |
I0.2Risingedge |
5 |
|
|
6 |
I0.3Risingedge |
6 |
|
|
35 |
I7.0Risingedge(signalboard) |
7 |
|
|
37 |
I7.1Risingedge(signalboard) |
8 |
|
|
- |
Reseved |
9 |
|
|
- |
Reseved |
10 |
|
|
1 |
I0.0Fallingedge |
11 |
|
|
3 |
I0.1Fallingedge |
12 |
|
|
5 |
I0.2Fallingedge |
13 |
|
|
7 |
I0.3Fallingedge |
14 |
|
|
36 |
I7.0Fallingedge(signalboard) |
15 |
|
|
38 |
I7.1Fallingedge(signalboard) |
16 |
|
|
- |
Reserved |
17 |
|
|
- |
Reserved |
18 |
|
|
12 |
HSC0CV=PV(currentvalue=presetvalue) |
19 |
|
|
27 |
HSC0Directi |
20 |
|
|
28 |
HSC0Externalreset |
21 |
|
|
13 |
HSC1CV=PV(currentvalue=presetvalue) |
22 |
|
|
- |
Reserved |
23 |
|
|
- |
Reserved |
24 |
|
|
16 |
HSC2CV=PV(currentvalue=presetvalue) |
25 |
|
|
17 |
HSC2Directi |
26 |
|
|
18 |
HSC2Externalreset |
27 |
|
|
32 |
HSC3CV=PV(currentvalue=presetvalue) |
28 |
|
|
- |
Reserved |
29 |
|
|
- |
Reserved |
30 |
|
|
- |
Reserved |
31 |
|
|
- |
Reserved |
32 |
|
|
Timed LowestPriority |
10 |
Timedinterrupt0SMB34 |
0 |
|
11 |
Timedinterrupt1SMB35 |
1 |
|
|
21 |
TimerT32CT=PTinterrupt |
2 |
|
|
22 |
TimerT96CT=PTinterrupt |
3 |
下一篇:http://www.testmart.cn/Home/News/data_detail/id/18180182.html
