西门子PLC、西门子变频器、西门子触摸屏、西门子伺服电机、西门子电线电缆等
SIEMENS 上海庆惜自动化设备有限公司
德国西门子(授权)区代理

【产品库存】 现货销售
【产品价格】电议(含16%增值税)
【产品质量】原装
【产品包装】全新原装、现货销售。
【售后服务】质保一年货到后有任何质量问题7天内包换人为除外)

西门子通讯网卡代理西门子通讯网卡代理

编辑
机型丰富,更多选择
提供不同类型、I/O 点数丰富的CPU 模块,单体I/O 点数总线高可达60 点,可大部分小型自动化设备的控制需求。另外,CPU 模块配备型和经济型供用户选择,对于不同的应用需求,产品配置更加灵活,总线大限度的控制成本。
西门子DT04西门子DT04西门子DT04
选件扩展,定制 电 话:(同微)
新颖的板设计可扩展通信端口、数字量通道、模拟量通道。在不额外占用电控柜空间的前提下,板扩展能更加贴合用户的实际配置,产品的利用率,同时用户的扩展成本。
配备西门子高速处理器芯片,基本指令执行时间可达0.15 μs ,在同级别小型PLC 中。一颗强的“芯”,能让您在应对繁琐的程序逻辑,复杂的工艺要求时的从容不迫。
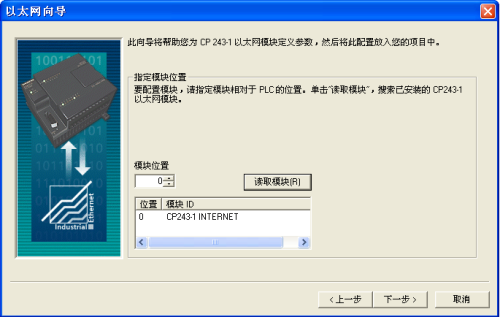
? 设置模块位置,可以使用“读取模块”来自动识别;
?? 设置模块CP243-1 IT 的IP地址192.168.0.8和子网掩码255.255.255.0;
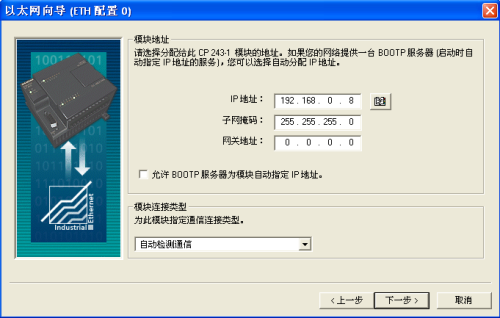
图8: 设置IP 地址
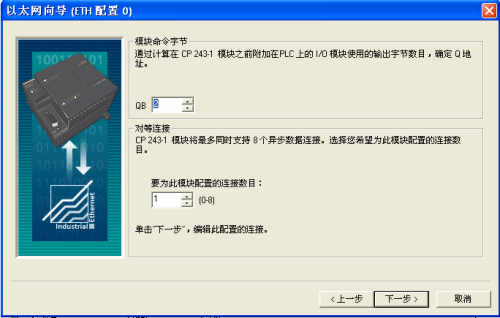
?? 设置模块的连接数1 ,总线多只能设置8个,也就是说S7-200可同时与总线多 8 个 S7 通讯伙伴进行通讯;
产工作原理由一个中心有轴的光电码盘,其上有环形通、暗的刻线,
编码器(图5)有光电发射和件读取,四组正弦波组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D反向,叠加在A、B两相上,可增强;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可编码器的零位参考位。编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有,其热性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热性、寿命均要差一些。
分辨率—编码器以每360度提供的通或暗刻线称为分辨率,也称解析分度、或直接称线,一般在每转分度5~10000线。
6主要作用它是一种将位移转换成一串数字脉冲的式传感器,
编码器(图6)这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
编码器产生电后由数控制置CNC、可编程逻辑控制器PLC、控制等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数是基于径向分度盘的,该分度由交替的透光窗口和不透光窗口构成的。此全部用一个红外光源垂直照射,这样光就把盘子上的图像投表面上,该覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,编码器也能一个速度,这个要反馈给变频器,从而调节变频器的输出数据。故障现象:1、编码器坏(无输出)时,变频器不能正常工作,运行速度很慢,而且一会儿变频器保护,显示“PG断开”...联合才能起作用。要使电上升到较高电平,并产生没有任何的方波脉冲,这就必须用电子电路来处理。编码器pg接线与参数矢量变频器与编码器pg之间的连接,必须与编码器pg的型号相对应。一般而言,编码器pg型号分差动输出、集电极开路输出和推挽输出三种,其的传递必须考虑到变频器pg卡的接口,因此选择的pg卡型号或者设置合理.
编码器一般分为增量型与型,它们存着总线大的区别:在增量编码器的情况下,
编码器(图7)位置是从零位标记开始计算的脉冲数量确定的,而型编码器的位置是由输出代码的读数确定的。在一圈里,每个位置的输出代码的读数是的; 因此,当电源断开时,型编码器并不与实际的位置分离。如果电源再次接通,那么位置读数仍是当前的,有效的; 不像增量编码器那样,必须去寻找零位标记。
编码器的厂家生产的系列都很全,一般都是的,如电梯型编码器、机床编码器、伺服电机型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。
编码器是把角位移或直线位移转换成电的一种装置。前者成为码盘,后者称码尺.按照读出编码器可以分为式和非式两种.式采用电刷输出,一电刷导电区或绝缘区来表示代码的状态是“1”还是“0”;非式的接受元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”。
按照工作原理编码器可分为增量式和式两类。
编码器(图8)增量式编码器是将位移转换成周期性的电,再把这个电转变成计数脉冲,用脉冲的个数表示位移的大小。式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间无关。
增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的,当来电工作时,编码器输出脉冲中,也不能有而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的是参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等。这样的编码器是由码盘的机械位置决定的,它不受停电、的影响。
编码器由机械位置决定的每个位置的性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗特性、数据的可靠性大大了。
由于编码器在定位方面明显地优于增量式编码器,
编码器(图9)已经越来越多地应用于工控定位中。型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输出必须确保连接很好,对于较复杂工况还要隔离,连接电缆芯数多,由此带来诸多不便和可靠性,因此,编码器在多位数输出型,一般均选用串行输出或总线型输出,德国生产的型编码器串行输出总线常用的是SSI(同步串行输出)。
多圈式编码器。编码器生产厂家运用钟表齿轮机械的原理,当中心码盘时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再圈数的编码,以扩大编码器的测量范围,这样的编码器就称为多圈式编码器,它同样是由机械位置确定编码,每个位置编码不重复,而无需记忆。多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。多圈式编码器在长度定位方面的优势明显,已经越来越多地应用于工控定位中。
创建读取数据传输 PeerMessage_1, 读取 16字节 DB2.DBB0~ DB2.DBB15 到VB0~VB15;
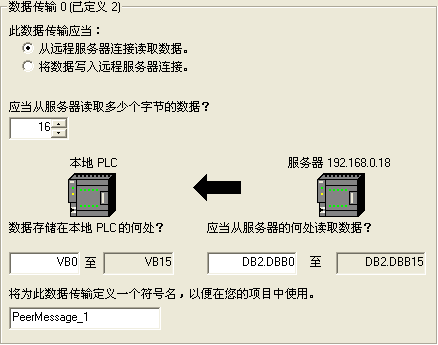
图11: 配置数据传输0
?? 创建读取数据传输 PeerMessage_2, 将 16字节VB16~VB31写入DB2.DBB16~ DB2.DBB31 ;
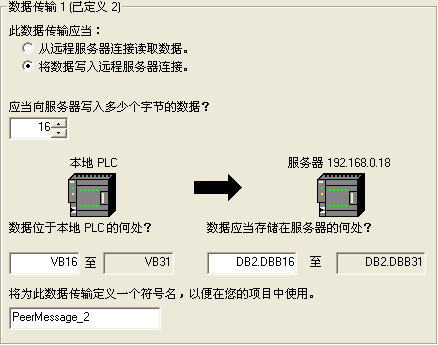
图12: 配置数据传输1
?? 为配置分配存储区;
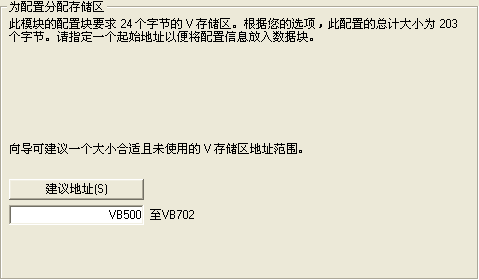
图13: 分配存储区
4. 4 S7-200 PLC 编程
?? 在STEP 7-MicroWIN 中主程序中,调用子程序ETH0_CTRL;
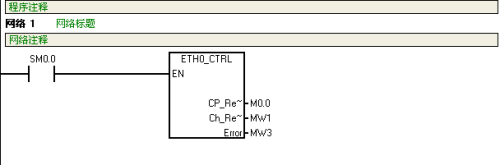
图14: 调用ETH0_CTRL
其中CP_Ready 为CP 243-1 IT 的状态(0 未就绪,1 就绪),CH_Ready 为每个通道或 IT 服务的状态(0通道 ,值为256):Error 为出错或报文代码;
有源总线模板宽度
将接口模块放置到已经安装在ET200M安装导轨的*个有源总线模板上,接口模块可以放置在以下有源总线模板上:
BM PS/IM(订货号:6ES7195-7HA00-0XA0)
BM IM/IM 作为冗余配置(订货号: 6ES7195-7HD10-0XA0)
在PS/IM 或 BM IM/IM的右侧安装IO模块的有源总线模板,有两种规格:
可以安装2个40 mm 宽的 IO 模块 (订货号: 6ES7195-7HB00-0XA0)
可以安装1个80 mm 宽的 IO 模块 (订货号: 6ES7195-7HC00-0XA0)
所有的有源总线模板都是80mm宽。
配置示例:482.6mm宽的ET200M安装导轨
可以安装总线多5个80mm宽的有源总线模板在482.6mm宽的ET200M安装导轨上,这意味着:
一个BM PS/IM 或 BM IM/IM
总线多4个IO模块的有源总线模板
在BM PS/IM上可以安装一个接口模块,例如IM153-4,如果在BM PS/IM右侧安装两个可以安装2个40 mm宽的 IO 模块的有源总线模板及2个可以安装1个80 mm 宽的 IO 模块的有源总线模板,那么就还可以安装4个40mm宽的IO模块及2个80mm宽的IO模块
配置示例:530mm宽的ET200M安装导轨
530mm宽的ET200M安装导轨上可以安装总线多6个80mm宽的有源总线模板在,这意味着:
一个BM PS/IM 或 BM IM/IM
总线多5个IO模块的有源总线模板
配置示例:620mm宽的ET200M安装导轨
宽的ET200M安装导轨上可以安装总线多7个80mm宽的有源总线模板在,这意味着:
一个BM PS/IM 或 BM IM/IM
总线多6个IO模块的有源总线模板
DetailPages.ToPageTop
也提供以下语言版本: 德语
英语
西班牙语
意大利语
文献属于产品树图文件夹(n):
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 数字量输入/输出模块 321输入模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 数字量输入/输出模块 322输出模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 数字量输入/输出模块 323输入/输出模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 模拟量输入/输出模块 331输入模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 模拟量输入/输出模块 332输出模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 模拟量输入/输出模块 334模拟量输入/输出模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Signal modules 模拟量输入/输出模块 335 模拟输入/输出
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 故障-型数字量/模拟量/输入/输出模块
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Ex数字输入/输出模块 Ex digital input modules
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Ex数字输入/输出模块 Ex digital output modules
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Ex模拟输入/输出模块 Ex og input modules
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 Ex模拟输入/输出模块 Ex og output modules
自动化技术 自动化技术 工业自动化 SIMATIC PLC 控制器 S7-300 特殊功能
自动化技术 自动化技术 工业自动化 SIMATIC IO ET 200 systems for the cabinet ET 200M IM153-1/IM153-2
自动化技术 自动化技术 工业自动化 SIMATIC IO ET 200 systems for the cabinet ET 200M IM153-4 PN IO
自动化技术 自动化技术 工业自动化 SIMATIC IO ET 200 systems for the cabinet ET 200M 附件
3)修改MODBUS通讯参数,其它参数为Cn011连接宏默认参数:
P2014[0]=0 不监控报文间隔时间,否则可能会报F72故障
P2021[0]=3 MODBUS设备地址为3(与屏组态中设置的从站地址一致)
4. 屏组态
在WinCC Flexible 2008 SP4 China中组态Smart 1000 IE屏。详细步骤如下:
1)创建项目。
创建一个空项目,如图3所示。

图3 创建空项目
选择屏设备为Smart 1000 IE,如图4所示。

图4 选择Smart 1000 IE屏
2)设置连接。
在连接画面中新建一个连接,相关参数设置如下:
通讯驱动程序:Modicon MODBUS
类型:RS485
波特率:9600
奇偶校验:偶西门子电源PM207西门子电源PM207西门子电源PM207
数据位:8
停止位:1
组帧:RTU Standard 电 话:(同微)
CPU类型:984
从站地址:3
连接设置如图5所示。

图5 连接设置
3)添加变量。
添加与变频器监控相关的10个变量,如表3所示。
表3 变量列表
| 变量名 | MODBUS寄存器地址 | 说明 |
| CtrlWord1 | 40100 | 控制字1 |
| SetPoint | 40101 | 速度设定值 |
| StsWord1 | 40110 | 状态字1 |
| Feedback | 40111 | 速度实际值 |
| ActFreq | 40342 | 实际值 |
| OutpVoltage | 40343 | 输出电压 |
| DCVol | 40344 | 直流电压 |
| OutpCurrent | 40345 | 输出电流 |
| OutpTorque | 40346 | 输出转矩 |
| OutpPower | 40347 | 输出功率 |
变量地址参照V20变频器操作手册,添加完成后的变量画面如图6所示。

图6 添加变量
速度设定值变量SetPoint是由-16384(-4000H)到+16384(+4000H)来表示-50Hz到+50Hz的转速,此处采用变量的线性转换属性,将-16384对应-1500,+16384对应+1500,如图7所示。再采用变量的值属性,将变量的输入值在-1600和+1600之间,如果出该值的范围,则输入不起作用。如图8所示。
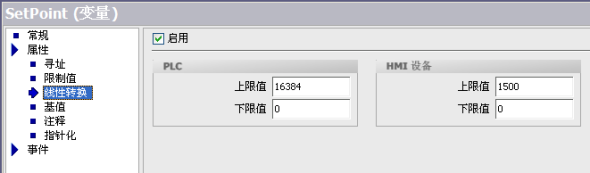
图7 速度设定值变量线性转换

图8 速度设定值变量值
速度反馈值变量Feedback也是由-16384(-4000H)到+16384(+4000H)来表示-50Hz到+50Hz的转速,此处也采用变量的线性转换属性,将-16384对应-1500,+16384对应+1500,如图9所示。注意,图9和图7所示的线性转换是一致的。

图9 速度反馈值变量线性转换
4)添加画面。
项目生成时已经有一个模板和一个画面,此例仅用到一个画面。修改画面的名字为V20_Monitor,如图10所示。

图10 编辑之前的画面V20_Monitor
5)编辑模板。
模板中的对象在选择使用模板的画面中会显示出来,此处把西门子的LOGO和退出Runtime的按钮放置在模板中,如图11所示。

图11 编辑模板
然后在按钮的事件属性中添加函数。在按钮STOP RT事件属性的单击事件下添加StopRuntime函数,如图12所示。

图12 退出运行画面按钮事件设置
6)编辑画面。
在V20_Monitor画面中放置IO域、文本域、按钮、棒图、圆形等对象。在文本域中输入相应的文本,设置字号、颜色等,将相关对象分类排列整齐,完成后的V20_Monitor画面如图13所示。

图13编辑完成的画面V20_Monitor
给10个IO域分别连接10个变量。
其中控制字1和状态字1采用16进制显示,控制字1类型为输入/输出,状态字1类型为输出,如图14所示。

图14 控制字1对应IO域常规设置
转速设定、实际转速、输出电压、直流电压采用带符号整数显示,转速设定类型为输入/输出,其它三个变量类型为输出,如图15所示。

图15 实际转速对应IO域常规设置
输出、输出电流、输出转矩、输出功率采用带符号整数显示,并小数点2位,类型为输出,如图16所示。此处小数点2位的作用是将通讯接收到的值除以100并显示在屏上,这样做的理由是V20变频器在发送这些值时将实际值乘了100。

图16 输出电流对应IO域常规设置
除了用IO域来显示实际转速的数值外,还采用棒图这种图形化的形式来显示实际转速,编辑完成的棒图外观如图17所示。

图17 编辑完成的棒图外观
设置棒图的常规属性,其中连接变量为Feedback,总线大值设为2000,总线小值设为-2000,如图18所示。

图18 棒图常规属性设置
设置棒图的外观,如图19所示。

图19 棒图外观属性设置
设置棒图刻度,如图20所示。

图20 棒图刻度属性设置
运行指示灯用来指示变频器是否处于运行状态,连接变量为StsWord1的第2位,运行时显示绿色,非运行时显示白色。其外观动画设置如图21所示。

图21 运行指示及其外观动画设置
反转指示灯用来指示变频器是否处于反转状态,连接变量为StsWord1的第14位,反转时显示绿色,非反转时显示白色。其外观动画设置如图22所示。
图22 反转指示及其外观动画设置
故障指示灯用来指示变频器是否处于故障状态,连接变量为StsWord1的第3位,故障时显示红色,非故障时显示绿色。其外观动画设置如图23所示。

图23 故障指示及其外观动画设置
接着设置4个按钮的功能,此处在按钮的单击事件下添加不同的函数来实现不同的功能。
启动按钮:添加SetValue函数,变量为CtrlWord1,值为1150(16进制047E)。再添加SetBitInTag函数,变量仍为CtrlWord1,位为0,如图24所示。每次按下启动按钮,屏将先发送047E,再发送047F给V20变频器,实现启动功能。
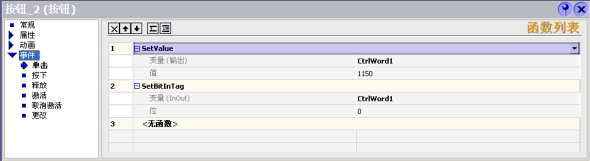
图24 启动按钮事件设置
停止按钮:添加ResetBitInTag函数,变量为CtrlWord1,位为0,如图25所示。每次按下停止按钮,控制字1的第0位将被复位为0,屏将发送047E给V20变频器,实现OFF1停车功能。
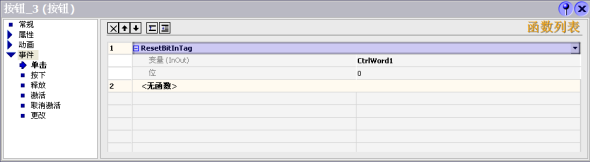
图25 停止按钮事件设置
反向按钮:添加InvertBitInTag函数,变量为CtrlWord1,位为11,如图26所示。每次按下反向按钮,控制字1的第11位将做非运算,屏将相应的正转或反转指令发送给V20变频器,实现转向反向功能。
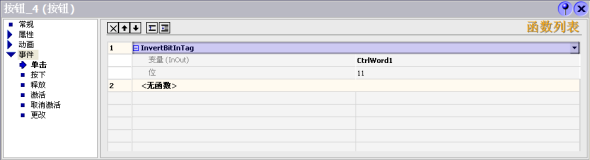
图26 反向按钮事件设置
故障确认按钮:添加SetBitInTag函数,变量为CtrlWord1,位为7。再添加ResetBitInTag函数,变量仍为CtrlWord1,位为7,如图27所示。每次按下故障确认按钮,屏将先发送1状态的故障确认位,再发送0状态的故障确认位给V20变频器,给故障确认位一个上升沿,实现故障确认功能。
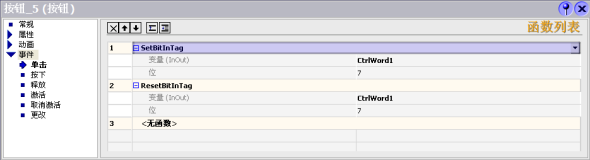
图27 故障确认按钮事件设置
5. 运行效果
完成上述步骤之后,下载组态程序至屏中。实际运行效果证明:ART LINE屏与V20变频器通讯正常,屏可以通过四个按钮控制变频器运行、停止、反向以及故障确认;变频器相关变量和状态可以在屏上正确显示。变频器运行时屏显示画面如图28所示。
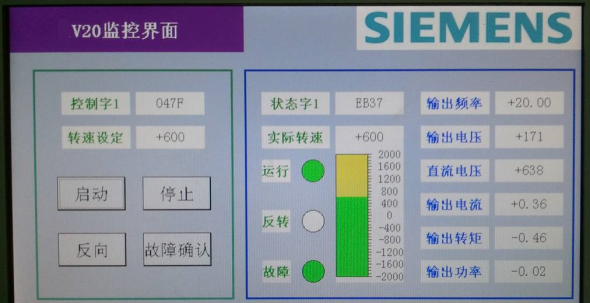
图28 变频器运行时屏显示画面
1 问题描述
S7-200 的断电数据保持不支持高速计数器的范围设置,因此高速计数器的当前值在CPU每次断电后都会复位为数值0。要使S7-200高速计数器的当前值在CPU断电重启后依然保持,可以通过以下的编程来实现。
2 实现
在此以高速计数器0的1为例来说明如何在S7-200 CPU断电后保持高速计数器的当前值,具体可参考以下三个部分的编程来实现:
首先,在除了*个扫描周期之外的其它周期,将高速计数器0的当前值HC0传送到寄存器VD1000中,如下图1所示,以保证寄存器VD1000始终存储的是HC0的当前值。
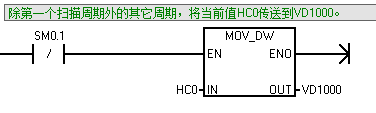
图1 传送当前值到寄存器
其次,在上电的*周期将寄存器VD1000存储的数值传送到高速计数器的当前值,保证高速计数器以VD1000为初始值开始计数,并初始化高速计数器0,如下图2所示:
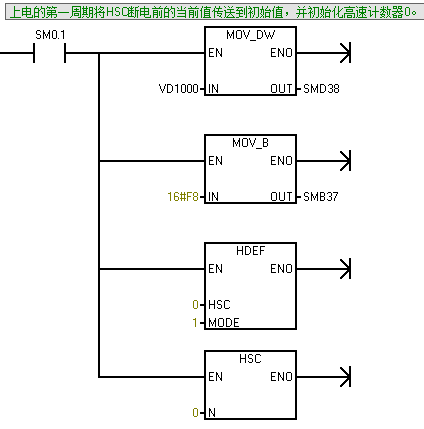
图2 初始化HSC0
总线后,在块的断电数据保持处设置寄存器VD1000为断电保持区域,如下图3所示。需要注意的是CPU224及其以上的型号总线多支持100个小时(理论值)的断电保持时间,如果断电时间过100个小时的话,可以考虑电池卡;或者将当前值保存到MB0-MB13这14个字节的存储单元。
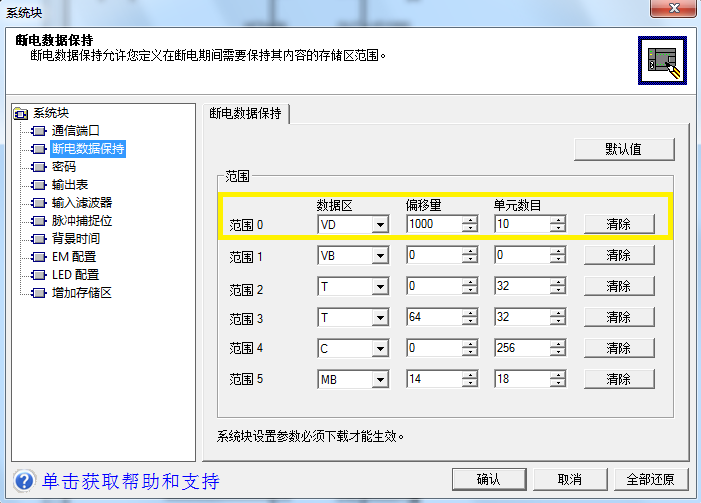
图3 设置断电数据保持
