基于 PROFIBUS-DP 的触摸屏与变频器通讯 付 斌 1,李秀东 2,李华章 3 (1.武汉工程职业技术学,湖北 武汉 430080;2.武钢大治铁矿,湖北 黄石 435006; 3.武钢程潮铁矿,湖北 鄂州 436051) 摘 要: 我们熟悉西门子自动化产品触摸屏 (HMI) 与 PLC 之间的通讯、 变频器与 PLC 之间的通讯及 PLC 之间的通讯,那么 HMI 与变频器之间能否通讯呢?现有的西门子 HMI、 变频器资料及软件中没有答案,也找不到这方面的应用案例。
本文对西门子 HMI 与变频器 之间的通讯进行了探讨, 选用带有 DP 接口的西门子 HMI 与带有 DP 模板的 MM440 变频器, 实现了二者之间的 PROFIBUS-DP 通讯。
关键词:触摸屏;变频器;DP;通讯 Touch screen and inverter d on profibus-dp communication Fu Bin1, Li Xiudong2 , Li Huazhang 3 (1.Wuhan Engineering Institute, Hubei Wuhan 430080,;2. Daye iron ore mine of WISCO, Hubei Huangshi 435006;3. Chengchao Iron Mine of WISCO, Hubei Ezhou 436051) Abstract: We are familiar with Siemens automation products touch screen (HMI) Newsletter, and PLC communication between inverter and PLC and between the PLC and then whether the communication between the HMI and drive it? Existing Siemens HMI, inverter data and software are not the answer, can not find this application cases. In this er, the communication between Siemens HMI and inverter were discussed, the choice of Siemens HMI and MM440 inverter with DP interface with DP template, the successful implementation of the PROFIBUS-DP communication between the two. Keywords: Touch screen; inverter; DP; Communications 1 前言 触摸屏又称人机界面(HMI) ,用来显示 PLC 的 I/O 状态和各种系统信息,接收操作人 员发出的各种命令和设置的参数,并将它们传送到 PLC,因此,HMI 只能与 PLC 通讯。
如 果 HMI 要与变频器通讯,一般需要 PLC 作为“桥梁” ,先用 PLC 与变频器通讯读取变频器 的信息,然后触摸屏再与 PLC 通讯,才能实现变频器或电动机启动、停止、调速以及监测 变频器、电动机的运行参数等功能。
如果 HMI 与变频器能直接通讯,就能省掉 PLC,可以 大大降低设备成本、设计费用、运行成本,还可以减少设备故障率,减少设备维护、保养工 作量。
目前市场上绝大部分触摸屏不能与变频器直接通讯,西门子 HMI、变频器也是如此, 西门子触摸屏组态软件 WinCC flexible 的“连接/参数”中十分清楚地显示 HMI 只能与 PLC 建立连接(通讯) ,如图 1 所示。
当然,市场上也有极少部分 HMI 能与 PLC 直接通讯,但 要自己制作连接电缆,然而,这种非标电缆的制作非一般工程技术人员能完成。
本文选用西 门子 TP177B 6〞color PN/DP 触摸屏、 带 DP 通讯模板的 MM440 变频器, 二者之间用 PROFIBUS 电缆连接,在 WinCC flexible 软件中进行相关组态,在 MM440 变频器中设置相关参数,不 仅实现了触摸屏与变频器之间的人机“对话”功能,还能监测变频器及电动机的所有参数, 笔者将此应用于某矿井下通风机的控制、监测上,受到了用户欢迎,拟在全矿推广。
2 WinCC flexible 组态 启动 WinCC flexible 软件创建新项目,选择上述 HMI 设备版本。
1
在 HMI 中设置变频器的频率比例,改变频率的设定比例,可以调节电动机的转速;用 HMI 中的“软”按钮控制变频器(电动机)的起动、停止;用输出 IO 域监测变频器(电动 机)的运行频率,电动机的电流、电压、转速、温度及变频器的温度,还可根据需要监测变 频器或电动机的其它参数。
图1 WinCC flexible 中 HMI 与 PLC 连接 2.1 变量的组态 首先建立 “连接” , 如图 1 所示, 连接的通讯驱动程序为 SIMATIC S7 300/400, 选用 IF1B 端口,设置 HMI 的地址为 1。
特别要注意二点,一是 HMI 所连接的对象不是 PLC,而是变 频器,因此图中“PLC 设备”下面的地址 3 就是变频器 DP 通讯模板上拔码开关所设定的地 址;二是因为采用 PROFIBUS-DP 通讯方式,因此 “网络”下面的配置文只能是 DP,不能 设置成 MPI 或其它。
由于 HMI 要和变频器通讯,因此,建立的变量均为外部变量,外部变量是触摸屏与变 频器进行数据交换的桥梁,HMI 通过外部变量去访问变频器中的参数,变频器通过外部变 量将数据传送给 HMI。
二者之间能否通讯,关键是外部变量的存储区及其地址怎样确定, 如果仍沿用 M 位存储器区及其地址,不能通讯,必须使用 DB 数据块区及其地址,二者之 间才能进行数据访问及读写。
外部变量的地址(DB 块号)就是变频器的参数号,即用 DB 块指示变频器的各个参数,DB 块的访问单位表示变频器参数的下标(index)值,例如要对 P2810.0 进行读写,则变量的地址应为 DB2810.DBD0;要对 P2810.1 进行读写,则变量的地 址应为 DB2810.DBD1。
根据变频器的参数是 U32 或者 U16,在建立变量时为其选择正确的 数据类型。
详见表 1。
注意通过 P2889 设定的频率值是以百分数显示的。
根据上述要求和设备控制、监测需要,建立 8 个变量,如图 2 所示。
变量的数据类型和 DB 块访问单位的数据类型要匹配,由于 DB 块的访问单位是 32 位的双字(DBD) ,因此, 变量的数据类型均为 32 位的浮点数(Real)或 32 位的长整数(DInt) ;为了保证 HMI 画面 中显示的监测对象能“平滑”地变化,要将变量默认的采集周期 1s 改为 100ms。
表1 HMI 变量 输出电压 输出电流 设定频率 起动电机 地址 变频器 参数号 DB25DBD0 DB27DBD0 DB2889DBD0 DB2810DBD0 r0025 r0027 P2889 P2810 输出电压 输出电流 固定设定值 AND 1 电机转速 电机温度 当前频率 变频器温度 DB22DBD0 DB35DBD0 DB66DBD0 DB37DBD0 HMI 变量与变频器参数对应关系 功能 HMI 变量 地址 变频器 参数号 r0022 r0035 r0066 r0037 转子速度 电机温度 输出频率 变频器温度 功能 2

西门子PLC与PLC之间通过以太网互连
西门子 PLC 与 PLC 之间通过以太网互连 目前西门子 S7-300/400 系列的 PLC 的通讯方式开始大量使用工业以太网通 讯,MP277/377、xP177B 系列触摸屏也集成了以太网接口,这带来一个好处,所 有的接口都统一, 在网络通讯时采用都以太网接口, 所有的设备组成一个局域网, 包括上位监控计算机、编程设备、PLC、触摸屏都能很方便地互相访问,需要扩 展多一个设备也很方便,只需要加一个交换机就能扩展出多个接口。
因为有这些 好处, 所以采用以太网通讯越来越流行, 下面说一说以太网通讯的其中一个应用, PLC 与 PLC 之 间通过以太网互连。
一、S7-300/400 之间互连 1、 采用 PLC 与 PLC 通过以太网访问, 需要增加以太网模块, CP343-1, 如 CP443-1 的模块,或者采用带有 PN 接口的 PLC,如 CPU315-2DP/PN 的 PLC。
2、采用两块 CP343-1 互连,先在同一个项目里做好两套 PLC 的硬件组态,分 配好 IP 地址, 打开 NetPro, 选择其中一个 PLC, 双击连接列表上的空白行, 添加一个 S7 conection。
选择连接的另一个 PLC,记住连接的 ID 号。
通讯 双方的其中一个站为 Client 端,激活“Establish an active connection” 的选项(默认是激活的)。
这样 NetPro 的配置就完成了,编译、下载完成 3、打开其中两套 PLC 的 OB1,调用 FB12(BSEND)块发送数据,FB13(BRCV)块 接收数据,1#PLC 的发送对应 2#PLC 的接收,1#PLC 的接收对应 2#PLC 的发 送。
4、调用 FB12 的时候几个参数的含意,a、REQ,发送开始,上升沿触发发送 工作;b、ID,连接 ID 号,这个 ID 号是在 NetPro 组态时生成的 ID 号;c、 R_ID,连接号,相同连接号的 FB 块互相对应发送/接收数据,这个是由用户 编程时定义的,例如 1#PLC 的 FB12 的 R_ID 是 DW#16#2,则 2#PLC 的 FB13 的 R_ID 也是 DW#16#2,这样才能保证正常接收发送;d、DONE,发送完成, 如果 REQ 端是一个不停的脉冲,正常情况下 DONE 端也应该也是一个不停的 脉冲反馈;e、SD_1,发送的开始地址,以 P# x.x byte xxx 来表示,f、LEN, 发送数据的长度。
5、采用 FB12、FB13 来进行发送/接收是比较麻烦的,一方面需要两端的以太 网模块都支持双边发送,如 Cp343-1-Lean 就不支持了,另一方面,两边都 要 写 程 序 , 对 于 增 加 的 系 统 不 太 方 便 , 所 以 这 时 可 以 在 NetPro 里 把 One-way(单边通讯,激活后 FB12、FB13 不能使用)激活,采用 FB14(GET)取 数据、FB15(PUT)发送数据来做,FB14 的参数定义和 FB12 差不多,只是少了 R_ID 和 LEN,这样更方便一些,而且还有一个好处,不需要对原有的系统进 行什么更改,只需要把单边的 PLC 组态和程序下载就可以了 6、 需要注意的另一个问题是 FB 和 SFB 的区别, S7-400 上采用 SFB, S7-300 在 在 上采用 FB,在 S7-300 集成的 PN 口上,采用 SFB,这个问题曾经折磨过我一 两天才解决。
二、WinLC 与 PLC 互连: WinLC 是在 PC 机上的软件 PLC,可以把一台 PC 机当成 PLC 使用。
这样对 于不能采用模拟器连接的软件是比较方便的,如采用 Intouch、Ifix 这些 SCADA 软件做为上位机软件时,测试是个麻烦的问题,需要与实际机器连接 起来才能测试,但如果有 WinLC,可以把程序拷到 WinLC 上运行,上位机软 件与 WinLC 联机测试,省去不少工夫,所以 WinLC 对于不方便进行现场测试
的环境,是个不错的替代方案。
WinLC 既然是一套软件 PLC,就能够实现 PLC 的功能,那么与 PLC 通讯也是可以实现的, 下面说一说 WinLC 与 S7-300 互连 1、新建一个项目,建立一个 S7-300 的站点,硬件组态;建立一个 PC 站点, 在 PC 站点上增加一个 WinLC 和一个 IE General,IE General 的 IP 地址与 PC 机的 IP 地址一致,其实 IE General 指的就是 PC 机的以太网卡。
2、打开 NetPro,在 WinLC 上新建一个 S7 conection,指向 S7-300,编译、 存盘 3、在 PCStation 上增加 WinLC 和 IE General,需要注意槽号要与硬件配置时 候一样 4、打开 WinLC 的 OB 块,调用 SFB14、SFB15 来读写 S7-300 的数据 5、启动 WinLC 软件,下载程序,这样就可以实现软件 PLC 与 PLC 互连了 三、两种方式的结合 如果有多台 PLC 需要与 PC 机上的 SCADA 软件通过 OPC 进行通讯,但是又发 现 SCADA 软件读取的速度太慢,不能满足刷新要求,或者数据要做些预处理才 能显示, SCADA 软件上运行太多的脚本又影响速度, 那么通过软 PLC 把多台 PLC 的数据先读过来进行预处理,SCADA 软件只与一台 PLC 进行通讯,这样 SCADA 软件上的工作量会少一些。
这个时候把上面说的两种方式结合一下,就能够实 现这样的功能了。
1、通讯连接参照上面的方法设置 2、在 WinLC 的 PC 站点上添加一个 OPC 服务器,在 NetPro 里面打开 OPC 的连 接列表,添加一个 S7 conection,指向 WinLC,编译、下载 3、通过 OPC 客户端可以直接访问 OPC 服务器的内容,常用的 SCADA 软件如 Intouch、Citect、IFix 这些软件都支持 OPC,设置访问连接就可以在软件 上直接读写了,如果更简单的界面,可以自己用 VB 编写一个 OPC 客户端, 读写数据都在 VB 程序上实现,不使用 SCADA 软件,可以省掉不少钱了。

触摸屏如何实现一机多屏通信?我们需要怎么做
在实际应用中,设备现场很大要,如果现场只有一个触摸屏控制时,操作起来就不是很方便了,如果要实现多个地方控制一台设备时,就要用到一机多屏。

触摸屏如何实现一机多屏通信?我们需要怎么做
所谓一机多屏是指:一个控制设备(PLC)连接多个触摸屏,所有的触摸屏都可以实现操作和显示。
实现一机多屏的方法有两种:
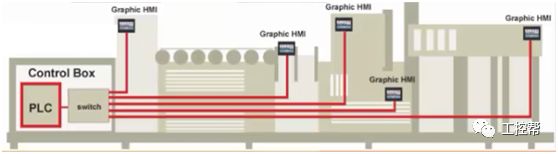
一、通过串行通信接口实现连接多个触摸屏的功能,连接如图1-1所示。

触摸屏如何实现一机多屏通信?我们需要怎么做
图1-1
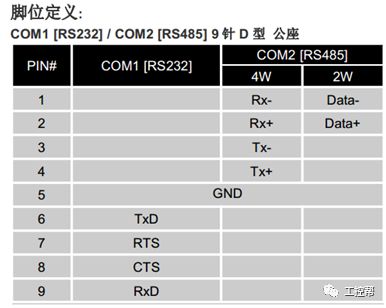
我们以西门子S7-200SMART与威纶通MT8071ip触摸屏通过串口实现一机多屏设置。查阅MT8071ip的通信口针脚如图1-2所示。采用COM2(RS485-2W)与PLC通信,PLC的3号对HMI的2号,PLC的8号对HMI的1号。再采用COM1(RS232)与从屏通信实现分屏,主屏HMI 1的6号对从屏HMI 2的9号,主屏的9号对从屏的6号。
触摸屏如何实现一机多屏通信?我们需要怎么做
图1-2
连接好外部接线后,开始建立HMI文件,首先建立主屏文件,系统参数中设备清单如图1-3所示。
图1-3
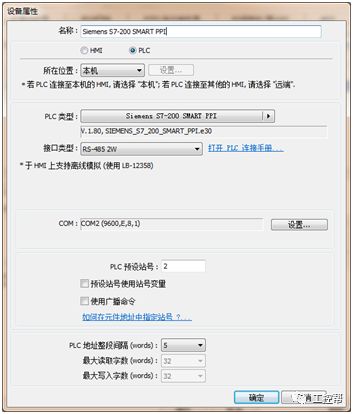
因主屏HMI1的COM2与PLC通信,所以应设置“本机PLC”详细通信参数,此处设置为SimensS7-200 SMART PPI如图1-4所示。
图1-4
. 因主屏HMI 1的 COM 1用来接收来自从屏的命令,所以必须建立 “Master-Slave Server”类型的设备,用来设定 COM1的属性,如图1-5所示。由图可以发现 COM1的通讯参数为“9600,E,8,1” ,并使用 RS-232 接口。此项参数并不限定需与 PLC 的通讯参数相同,但限制数据位必须为 8。另外,尽可能设定为较快的通讯速度,这样从屏可以较快的读取到 PLC 的数据。
图1-5
主屏创建好后另存一份,作为从屏文件,只需要将系统参数的设备清单改为图1-6所示。
图1-6
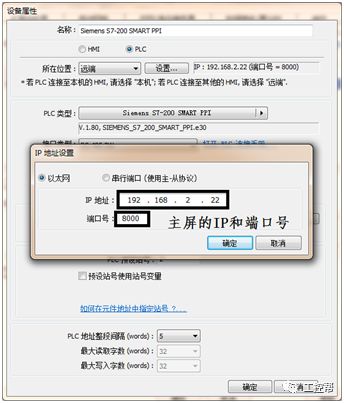
因为从屏HMI 2所读取的 PLC 连接在主屏上,所以从屏将 PLC 视为远程 PLC ,因此在设备清单中需存在“*远程 PLC 1 “,此时所连接的 PLC 为SimensS7-200 SMART PPI。
在设备清单中建立一个新的设备,”PLC 类型”请选择 “SimensS7-200 SMART PPI”,“PLC 预设站号” 需与 PLC 所使用的站号相同,如图1-7所示。
图1-7
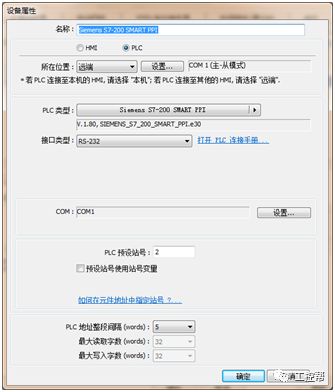
2.设定正确的通讯参数。此时从屏的 COM 1 是与触摸屏 1 的 COM 1相互连接,并不是与PLC 直接连接,因此必须忽略 PLC 的通讯参数,而应让触摸屏 2 的 COM 1 与触摸屏 1 的COM 1所使用的接口与通讯参数相同。因为触摸屏 1 的 COM 1使用 RS-232 接口,通讯参数为 “9600,E,8,1”,所以触摸屏 2 的 COM 1 也需依此参数设定,参考图1-8所示。
图1-8
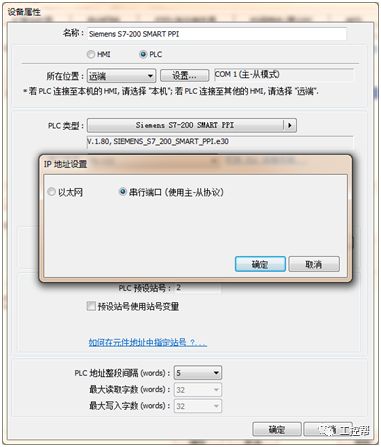
3.因为触摸屏 2 视 PLC 为远程 PLC ,所以需选择 “所在位置” 为 “远程”。并选择使用 “串行端口” 的方式连接远程触摸屏(即触摸屏 1 ),如图1-9所示。
图1-9
主屏和从屏的系统参数设置好后,创建一个位状态切换开关和一个位状态指示灯,如图1-10所示。分别将文件下载到触摸屏进行测试。
图1-10
二、通过以太网接口实现连接多个触摸屏的功能,主屏和从屏都是通过交换机连接在一起。
因主屏与PLC连接方式和串口分屏类似,只是不再需要添加“Master-Slave Server”参数设置如图2-1所示。
图2-1
因从屏通过以太网与主屏相连,参数设置中设备清单如图2-2所示。
图2-2
将PLC所在位置改为远端,点击“设置”选择以太网设置好主屏的IP地址和端口号,如图2-3所示。
触摸屏如何实现一机多屏通信?我们需要怎么做
图2-3
至此触摸屏的分屏介绍完了,希望能够帮助小伙伴们解决一机多屏的困扰,如果小伙伴们在试验的过程中碰到通信不上,或者没有看懂的地方,可以联系我们的助教美女,助教会时间安排老师给您亲自指导。

西门子触摸屏SIMATIC HMI KTP600的技术方案
西门子触摸屏SIMATIC HMI KTP600
单色的技术数据:
显示:5.7英寸STN显示屏,4级灰阶
分辨率:320x240像素
控制器件:电阻模拟触摸屏,带有6个可自由组态的触觉反馈键
用户存储器:512KB
接口:1xRJ 45以太网,适用于PROFINET
Schutzart:IP65 NEMA 4x(前面板,如果已安装)
后面板:IP20
安装开口:197x141mm(宽x高)
前面板:214x158mm(宽x高)
设备深度:44mm
组态软件:WinCC flexible紧凑版

西门子触摸屏SIMATIC HMI KTP600,SIMATIC HMI KTP600,西门子触摸屏
西门子触摸屏
SIMATIC HMI KTP600
单色的设计和功能:
西门子触摸屏
KTP600 Basic mono配备了5.7英寸STN显示屏可以提供4级灰阶。320x240像素的分辨率可以用合适的尺寸显示复杂度不高的操作屏幕。面板可以用电阻模拟触摸屏操作,还配有6个自由组态的功能键,它们在执行时可以提供触觉反馈。西门子触摸屏KTP600 Basic mono是适用于小型S7-1200控制器系统的理想的HMI组件。它可以使用WinCC flexible Compact或者用于S7-1200的STEP7基本工程组态软件的HMI组态软件进行组态。
西门子触摸屏KTP600单色可以提供500个变量的HMI基本的功能性(报警、趋势曲线、配方)。我们还可以提供入门级软件包,它除了包括WinCC flexible Compact组态软件之外,还用DVD光盘提供了SIMATIC HMI Manual Collection、一个以太网线,以及一份一年软件升级服务的证书,而且所有这些都具有相当大的价格优势。

西门子OP270触摸屏
1 APL库介绍
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
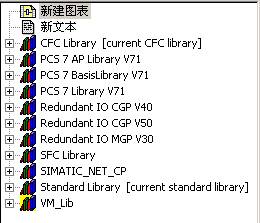
PCS 7 V7.1 SP1为西门子新一代DCS控制平台,为满足不同行业、不同用户 的控制要求,其提供了丰富的控制功能库。功能库有PCS 7 AP Library V71、PCS 7 BasisLibrary V71和PCS 7 Library V71。PCS 7 AP Library(本 文将缩写为APL)为高级过程库(非过程控制), 为V7.1以上版本所提供的全新功能库,其在原 有基本控制算法的基础上,增加了许多新的特性,例如,功能块特性参数(Feature)定制,远程/就地模式控制,面板关联,互锁控制, 辅助值显示等,可以满足不同行业、不同惯用户的各种不同应用需求。而且高级过程控制库带有全新V7.1显示风格的图标和面板,显示界面更加 丰富,操作方式更加贴近人体工程学的要求。
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
图1库 图
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
关 于APL库的更多信息请参考开始菜单à SIMATIC à Documentation à English下的“PCS 7 – Manual for advanced process library V7.1”文档和相关在线帮助。其中为满足不同用户、不同行业的控制惯 要求,APL库加入的特性参数(Feature)定制功能,请参考上述手册中的1.5章节。
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
此 文主要将主要介绍APL中的MotL电机块的使用。
line;">
附加信息:PCS 7 V7.1 SP1同时提供的另外两个功能库中,PCS 7 BasisLibrary为基本库,提供PCS 7所需的所有诊断功能块,如CPU_RT,SUBNET,OB_BEGIN等系统块。由系统在编译过程中自动调 用,不能在用户程序中人为调用。PCS 7 Library则相当于以前版本的PCS 7 Standard Lib库,包括了原有功能库中除BasisLibrary块之外的其他所有功能块,为兼容原有 版本而保留。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
2 MotL块基本特性介绍
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
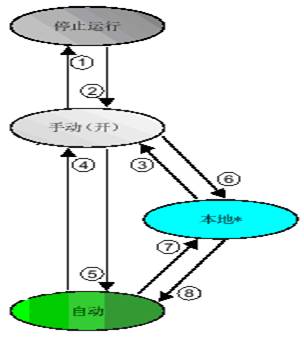
PCS 7 V7.1 SP1中,APL库MotL功能块主要用于控制单向启停电机,可以实 现电机的手动控制、自动控制、就地控制等;控制命令可以为单点的高低电平启停也可以为双点的脉冲控制启停;电机启动或运行过程中可以实行安全的连锁保护控 制等。其中MotL块的4种操作模式:就地模式、自动模式、手 动模式、停止服务模式介绍如下。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
qline;"> 就 地模式:此操作模式下,电机可通过位于“就 地”的 控制箱进行就地启停控制。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
qline;"> 自 动模式:此操作模式下,电机由程序功能块的输出来自动控制。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
qline;"> 手 动模式:此操作模式下,电机由操作员通过上位机面板手动控制。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
qline;"> 停 止运行:“停 止运行”操 作模式适用于所有带操作模式切换的功能块。该 操作模式适用于维护和维修阶段(例如,更换设备)。进 入此模式后,功能块将被禁用,上位机面板、程序自动控制命令等都不能控制电机。此外现场的故障信号也不会生成任何报警消息。在此操作模式下,电机和阀的所 有输出均设置到安全位置。(电机的安全位置始终是电机停止)
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
以 下是4种模式之间的切换关系,从图中看出除 停止运行模式外,其他各种模式之间可以进行相互的切换。 “停止运行 “模式只能从“手动” 模式下向其进行过 渡。
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
图2操 作模式的切换
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
下文将通过具体的章节详细介绍上述各 功能的应用。
3 MotL块的基本使用
3.1 MotL块调用及基本管脚介绍
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
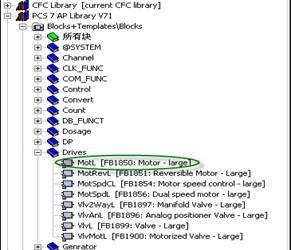
MotL功能块编号为FB1850,通过CFC进行调用,安装在循环中断OB中(OB30~OB38)中。如图,在PCS 7 AP Library V71/Drivers 里找到MotL然后拖入相应CFC中即可。
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
图3 调 用MotL
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;text-indent:2em;background-color:#FFFFFF;font-size:11px;">
功 能块基本管脚如下图,更详细的内容可以参见在线帮助。其中FbkRun管脚连接的是现场电机启动反馈信号,Start连接的是单点高低电平型电机启动输出 信号,该两管脚为基本的信号输入和输出管脚。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
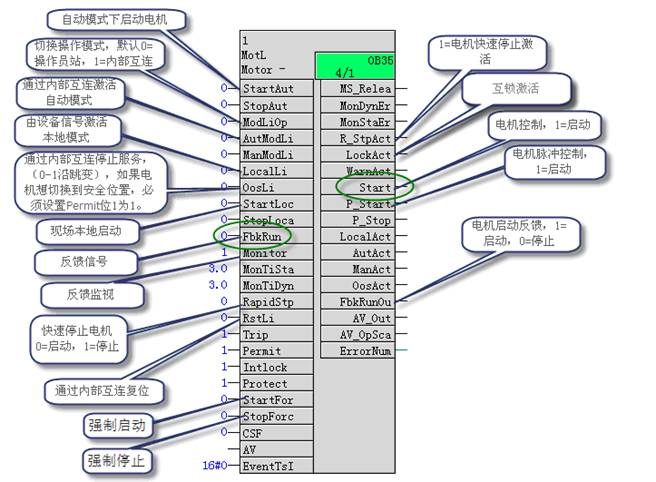 图4 MotL电 机块管脚
图4 MotL电 机块管脚
3.2如何通过操作员面 板启/停电机
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
在CFC中 调用该功能块后,对相应的基本管脚进行连接即可完成电机的基本控制功能。MotL中 与基本控制功能相关的管脚有:
line;">
|
管脚
|
功能
|
信号类型
|
|
FbkRun
|
电机启动反馈信号
|
输入
|
|
Start
|
单点高低电平型电机启停输出控制信号
|
输出
|
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
表1 操 作员界面启/停 电机相关的管脚
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
注:如果希望使用双点脉冲输出型控制 信号,请参考下述5.1章节的内容。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
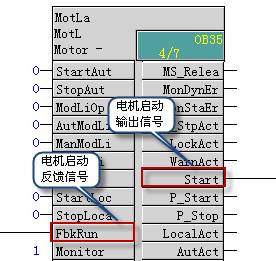
图5操 作员面板启/停 电机的CFC连 接
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
OS在 线后点击电机图标,打开如图6的 电机操作面板。点击“停 止”右 边的按钮可以弹出命令条,然后可以启动/停 止电机。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
 西门子OP270触摸屏
西门子OP270触摸屏
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
图6操 作员界面手动操作启停点击
3.3如何通过就地模式 启/停电机
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
当 需要通过就地操作箱相应的就地按钮来启停电机时,就需要用到MotL功 能块的就地模式控制。MotL功 能块中与就地控制相关的管脚有:
line;">
|
管脚
|
功能
|
默认值
|
信号类型
|
|
FbkRun
|
电机启动反馈信号
|
0
|
输入
|
|
LocalLi
|
切换就地模式信号
|
0
|
输入
|
|
StartLocal
|
就地启动信号
|
0
|
输入
|
|
StopLocal
|
就地停止信号
|
0
|
输入
|
|
LocalSetting
|
就地模式控制策略参数
|
0
|
输入
|
|
Start
|
电机启动输出信号
|
0
|
输出
|
|
LocalAct
|
就地模式激活信号
|
0
|
输出
|
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
表2就 地启/停 电机相关的管脚
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
上 述管脚中重要的一个管脚为Localsetting, 通过设置参 数LocalSetting为0,1,2,3,4不 同的数值,可以对电机进行不同的就地控制策略。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
LocalSetting = 0 关闭就地模式。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
LocalSetting = 1 通过就地模式切换信 号(连接至LocalLi输入管脚)实现就地模式的切换。就地模式下的启停命令(连接至StartLocal和StopLocal管脚)通过MotL块的控制命令(Start管脚)输出到现场MCC柜完成就地控制。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
LocalSetting = 2 通过就地模式切换信 号(连接至LocalLi输入管脚)实现就地模式的切换。就地模式下的启停命令不需要连接至StartLocal和StopLocal管脚,而是直接控制MCC柜完成就地控制。MotL 功能块根据反馈信号FbkRun进行电机现场运行状态的跟踪。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
LocalSetting = 3 现场不提供就地模式切换信号,而是通过上位机面 板实现就地模式的切换。就地模式下的启停命令(连接至StartLocal和StopLocal管脚)通过MotL块的控制命令(Start管脚)输出到现场MCC柜完成就地控制。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
LocalSetting = 4 现场不提供就地模式切换信号,而是通过上位机面 板实现就地模式的切换。就地模式下的启停命令不需要连接至StartLocal和StopLocal管脚,直接输出到MCC柜完成就地控制。MotL 功能块根据反馈信号FbkRun进行电机现场运行状态的跟踪。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
1. Drive ES PCS7 功能库简介
Drive ES PCS7 是SIEMENS公司专门为PCS7 系统开发的变频驱动器控制功能库,它包含了DRVPCS7 Library(AS)和DRVPCS7 Library(OS)两部分。此功能库继承了PCS7一贯的简单易懂的编程思想,只需要通过简单的硬件配置及CFC编程,即可完成PCS7系统对变频驱动器控制的集成,并提供丰富的只能诊断和控制功能。在操作员站可以通过Drive ES PCS7 集成的面板对变频驱动器的相关过程变量进行监视与操作,Drive ES PCS7 也可以将相关的驱动数据集成到PCS7 资产管理系统中。
line;color:#333333;background-color:#FFFFFF;font-size:11px;">
功能库中提供如下变频器的控制功能块:
√ MASTERDRIVES:SIMO_MD(针对SIMOVERT MASTERDRIVER VC和MC)
√ MICROMASTER:SIMO_MM3 、SIMO_MM4(针对MICROMASTER 第3和第 4代产品)
√ SIMOREG DC MASTER:SIMO_DCM(针对SIMIOREG DC Master)
√ SINAMICS G/S Serials:SINA_GS(针对SINAMICS S120/150和G130/150)
√ VIK/Namur:VIKNAMUR
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
功能库支持德、英、法三种语言。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
2.Drive ES 安装要求
显示器分辨率:至少1024*768
SIMATIC CPU/CP要求:
-
CPU41x-y from V3.1.0 (6ES7 414-3XJ00-0AB0, 6ES7 416-2XK02-0AB0,
6ES7 416-3XL00- 0AB0, 6ES7 417-4XL00-0AB0)
-
CPU41x-4H from V3.1.1 (6ES7 414-4HJ00-0AB0, 6ES7 417-4HL01-0AB0)
-
CP443-5ext from V5.1.0 (6GK7 443-5DX03-0XE0)
操作系统要求:
-
Windows 2000 、Windows XP professional、Windows 2003
-
PCS7 V6.1 or higher
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
3. 对SIMOVERT MASTERDRIVER参数化
在使用 Drive ES PCS7 功能库驱动 SIMOVERT MASTERDIRVER之前,必须对SIMOVERT MASTERDRIVER进行参数化。参数化有两种方式,一种是通过MASTERDRIVER上自带的面板进行参数设置,另外一种是使用Drive ES Basic软件中的Drive ES monitor对SIMOVERT MASTERDRIVER进行参数化。关于Drive ES Basic 软件的用法可参考手册Working with Drive ES Basic或参考在线帮助。下面演示了通过Drive ES Basic软件对SIMOVERT参数化的步骤。
1) 打开PCS7 项目,插入Drive 对象。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
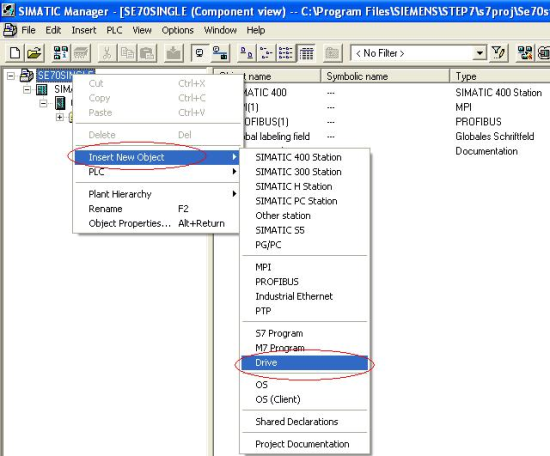
图1插入Drive 对象
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
2) 选择MASTERDRIVER 类型,并设定从站地址。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
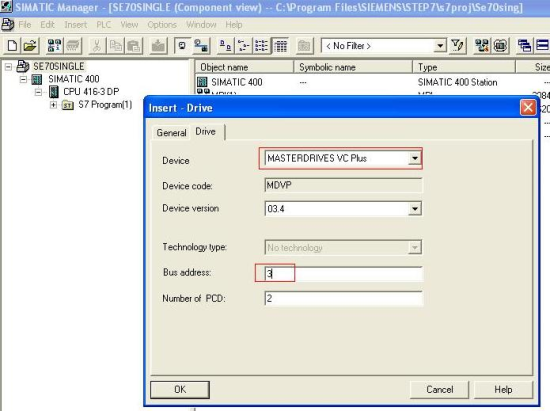
图2 设置类型及地址
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
3) 插入参数表
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">

图3 插入参数表
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
4) 打开参数表,进行参数设定。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
 西门子OP270触摸屏
西门子OP270触摸屏
图4 打开参数表
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">

图5 设定参数
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
在Drive ES PCS7 中下列参数必须分配给SIMOVERT:
P060=4: 选择硬件组态功能
P918=e.g.3:Profibus 从站地址
P060=1:结束硬件组态
P053=3 :使能对CBP/2和PMU 的参数化
P722.1=10:激活报文故障监视
其它参数参见附表1、2、3
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
4. Drive ES PCS7 组态过程
在对SIMOVERT 参数化之后,可以运行PCS7使用Drive ES 功能库进行编程组态。下面针对SIMOVERT MASTERDIRVER 在PCS7 中的使用,分两种情况(标准CPU 和冗余CPU)进行具体演示。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
1) 标准CPU 集成DP接口或扩展DP接口方式
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
I. 打开PCS7 系统,插入AS 站,进行硬件组态。选择Drive ES profile下的硬件列表,插入DBP2。由于SIMOVERT 与CPU 通讯是通过一个安装在SIMOVERT上的Profibus DP 通讯卡来进行的,所以组态时,应插入通讯卡的型号,本例中为CBP。然后组态DP通讯接口区间。如图6所示
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">

图6 接口通信区间设置
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
必须选择PCS7,PZD 6/6,PCS7功能库仅支持PZD通讯方式,且Consistency类型需设置为Entire Length。
注意:接口区间的输入输出映象区起始地址必须相同,此处为IW512/QW512。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">
II. CFC编程,使用SIMO_MD功能块,在CFC编译时选择Generate module driver和update sample time,如图7所示。连接到地址IW512(接口区首地址),输出地址无需连接,在CFC编译后,功能块的输出QC会自动与模板驱动相连接。
AC_START设置为1:非循环读取Fault Message。
line;color:#333333;background-color:#FFFFFF;text-indent:2em;font-size:11px;">