西门子S7-400控制单元6ES7412
西门子S7-400控制单元6ES7412
西门子S7-400控制单元6ES7412
SIEMENS(西门子销售中心)
上海西邑电气技术有限公司
zx-plc.com )
联系人:万紫云(销售经理)

西门子 知其道 用其妙
真诚对待您的每一次来电
博大精深 同心致远

1 IEC61850 标准
1.1标准概述
IEC61850是新一代的变电站自动化系统的国际标准,它规范了数据的命名、数据定义、设备行为、设备的自描述特征和通用配置语言。同传统的IEC60870-5-103标准相比,它不仅仅是一个单纯的通信规约,而是数字化变电站自动化系统的标准,它指导了变电站自动化的设计、开发、工程、维护等各个领域。该标准通过对变电站自动化系统中的对象统一建模,采用面向对象技术和独立于网络结构的抽象通信服务接口,增强了设备之间的互操作性,可以在不同厂家的设备之间实现无缝连接。智能化一次设备和数字式变电站要求变电站自动化采用IEC61850标准。IEC61850是至今为止为完善的变电站自动化标准,它不仅规范保护测控装置的模型和通信接口,而且还定义了数字式CT、PT、智能式开关等一次设备的模型和通信接口。采用IEC61850国际标准可以大大提高变电站自动化技术水平、提高变电站自动化安全稳定运行水平,节约开发验收维护的人力物力,实现完全的互操作,如图1所示。
IEC61850与传统的SCADA协议不同的是,它不仅是一个简单的协议,更涉及到通信网络性能要求、对象建模、系统和项目管理等多方面的规范要求。IEC61850采用面向对象的建模方法和抽象、分层映射的技术,通过规范系统和项目管理以及一致性测试等途径来保证其目标的实现,并且IEC61850不仅适用于变电站自动化系统内部网络通信,也适用于配电自动化、电能计量系统、发电厂自动化系统、风力发电以及其它工业领域。

图1:IEC61850与数字化变电站(SAS)之间的相互关系:
1.2 制造报文规范MMS
制造报文规范(Manufacturing Message Specification,MMS)是网络上实时处理和监控系统信息交换的国际标准,由国际标准化组织和国际电工委员会工业自动化技术委员会TC184工业组负责制定和发展,它适合于在不同的设备、应用、发展商和领域内提供通用信息服务,例如:MMS提供的读(Read)服务允许网络上的设备、应用或计算机从另外一个设备、应用或计算机内读取所需的变量,而不管这个变量是在可编程逻辑控制器、机器人、远方终端设备或智能电子设备内。MMS已经广泛应用在制造、石油化工、电力工业和太空探索等领域。
MMS由以下各部分组成:
1) 服务规范(Service Specification)
2) 协议规范(Protocol Specification)
3) 机器人伴同标准(Robot Companion Standard)
4) 数字控制器伴同标准(Numberical Controller Companion Standard)
5) 可编程逻辑控制器伴同标准(Programmable Logical Controller Companion Standard)
6) 过程控制系统伴同标准(Process Control System Companion Standard)
上列各部分中,部分服务规范和第二部分协议规范是其核心,服务规范包含的定义
有:①虚拟制造设备(Virtual Manufacturing Device,VMD);②网络上节点间的信息交换;③与VMD有关的属性和参数。协议规范定义的是通信规则,包括:①信息格式;②通过网络的信息顺序;③MMS层与ISO/OSI开放模型的其他层的交互,而3)-6)则是针对不同的应用领域的伴同标准。
MMS提供了丰富的针对对等式实时通信网络的一系列任务,已经成为许多工业领域的控制设备的通信协议,例如CNC、可编程逻辑控制器、机器人、电力领域中的远方终端设备(RTU)、能源管理系统(EMS)、重合器、开关等IED设备。许多流行的计算机平台都支持基于MMS的互联,在软件支持上,更多的API、图形界面、网关、字处理、电子表格、关系型数据库都支持MMS,从通信连接上看,MMS在以太网、令牌总线、串行接口RS-232C、OSI、TCP/IP、MiniMAP上也都很容易实现,如图2所示:

图2:MMS在IEC61850报文结构中的位置
1.3 IEC61850标准的体系结构
变电站自动化系统由各种IED 组成,主要完成变电站内设备的控制、监视和保护功能,并实现系统配置、通信管理和软件管理等系统维护功能。IEC 61850 标准将变电站自动化系统在逻辑上划分为3 层(即变电站层、间隔层和过程层),并将具体应用功能分解为许多常驻在不同IED 内、彼此间相互通信的单元,称为逻辑节点(logical node,LN),然后以LN 为对象建立变电站内IED 的统一的数据和服务模型,旨在解决不同厂商提供的IED间的数据交换、信息共享等问题。
遵循IEC 61850 标准的变电站自动化系统主要包括:①主站自动化系统软件(人机界面、数据库及系统管理等);②间隔层装置(保护、测控单元等);③过程层设备,包括电子式电流/电压互感器(electronic current/potential transducer,ECT/EPT)、智能断路器/隔离开关、合并单元等;④工程化工具(如配置工具等),用于管理IEC 61850所定义的的通信模型,并满足IEC 61850-6(配置)和IEC 61850-10(一致性测试)的规范要求,如图3所示:

图3:IEC61850与数字化变电站接口与体系结构
1.4数据模型
在了解数据模型之前,首先需要了解一些关于IEC61850 的重要概念
智能电子设备(IED):实际的物理设备,如开关、断路器,综保等。
功能:变电站自动化系统执行的任务,如:母线保护、联锁、报警管理等。
逻辑设备(LD):一种虚拟设备,聚合逻辑节点和数据,物理设备可以包含一个或多个LD。
逻辑节点(LN):用来描述系统功能的基本单位,是数据对象的容器,可以任意分配到
IED,每个逻辑节点和内部的数据都有具体的语义,并通过他们的服务与外部进行交互。
在IEC61850 中,一个IED 设备的外部性能通过Server 服务器类来表征,Server 服务器可以包含一个或多个逻辑设备,一个逻辑设备可以包含多个逻辑节点,在IEC61850 中一些逻辑节点是电力系统实设备的映射。一个IED 设备要实现特定功能必然需要这些逻辑节点来终实现操作、控制的功能。可以简单理解逻辑设备是IED 设备实现具体一个功能的抽象容器,在这个容器中包含了实现功能所需的相应的逻辑节点。
下图4描述了从一个实际的项目中如何对实际的物理设备建模的完整过程:

图4:设备建模的完整过程
就针对一个具体的IED设备模型而言,下图5描述了该物理设备中所包含的内容及其交互关系:

图5:数据模型所包含的内容及交互关系
下图6为一个实际的IED物理设备所包含的相关内容,该图描述了该LED设备中其中一个逻辑设备”Tampa_Control”的逻辑节点”Q0XCBR1”断路器的”位置Pos”数据的相关状态 “stVal和ctlVal”。

图6:一个实际的IED设备所包含的内容
2 “IEC61850 Server Library”软件包概述
2.1 “IEC61850 Server Library”通信概述
“IEC61850 Server Library”软件包是西门子推出的基于S7-300/400作为服务器端的IEC61850规约的通信解决方案,通过该软件包,可以将S7-300/400 “虚拟”为一个IEC61850服务器端设备,之后S7-300/400 可以支持在IEC61850总线上的过程变量导出,下图7为“IEC61850 Server Library”软件包通信览:

图7:“IEC61850 Server Library“软件包通信览
“IEC61850 Server Library “软件包具有如下特征:
1) 功能完全的功能块库,支持德语及英语的在线帮助。
2) 每个IEC61850 客户端设备将通过一个ISO-On-TCP连接服务器。
3) 多可以支持100 Data-Attribute及10 DataSet(每个DataSet包含100个Data-Attributes):
4) Data-Attribute支持如下数据类型,如图8所示:
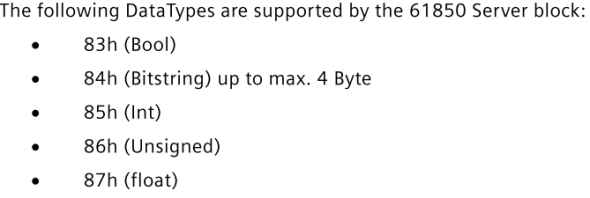
图8:”IEC61850 Server Library”所支持的数据类型

| 6SE6430-2UD32-2DA0MICROMASTER 430 无滤波器 380-480V+10/-10% 三相交流 47-63Hz 二次矩 22kW 过载 110% 60S,140% 3S 520x 275x 245(高x宽x深) 防护等级 IP20 环境温度 -10+40°C 无 AOP/BOP |
1 S7-1200与变频器的连接
1.1本例程的系统配置
本例程中用到的硬件: S7-1200(CPU 1214C)、G120 ( 控制单元CU240B-2 )、一台装有TIA Portal软件的PC机、CM1241模块、电源模块、标准RJ45网线。
1.2 硬件连接
1.2.1硬件连线
本例程中的硬件间的结构如下图所示:

图1-1
1.2.2 PLC与控制单元通信端口之间的连接
用电缆将CU240B-2 Modbus 通讯接口与PLC通信模块连接起来,如下图所示。
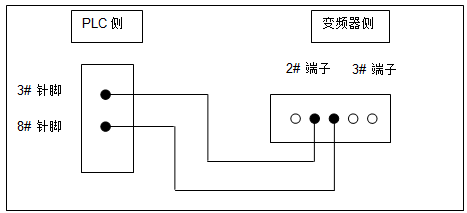
图1-2
2 变频器设置
2.1 地址设置
可以通过控制单元上的地址开关,也可以通过参数 P2021 或 STARTER 中“Control Unit / Communication / Field bus”页面来确定变频器的 Modbus-RTU 地址。
只有所有地址开关都设为“OFF”(0)时,P2021 或 STARTER 中的设置才有效。否则,Modbus-RTU 地址为地址开关所设置的地址。
2.2 参数设置
除了设置地址之外,还需要对其他一些变频器的通信参数进行设置,才可以进行MODBUS通信。具体需要设置的参数如表2-1所示:
表2-1
| 参数 | 描述 |
| P0015 = 21 | 变频器宏程序 选择 I/O 配置 |
| p2030 = 2 | 现场总线协议选择 2: Modbus |
| p2020 | 现场总线波特率 设置范围是 4800 bit/s … 187500 bit/s,出厂为 19200 bit/s |
| p2024 | Modbus 计时
|
| p2029 | 现场总线错误统计 指现场总线接口上接收错误的统计、显示 |
| p2040 | 过程数据监控时间 指没有收到过程数据时发出报警的延时。 注: 该时间必须根据从站数量、总线波特率加以调整,出厂为 100 ms。 |
3 PLC组态和编程
3.1 创建项目
首先创建一个项目,点击创建新项目,输入名称,路径等信息。

图3-1
3.2 硬件组态
按照新手上路的提示首先选择设备和网络,进行硬件组态。

图3-2
点击添加新设备,添加相应型号的设备,修改设备名称,选择版本号,点击添加。

图3-3
在弹出的设备与网络的右侧硬件目录中,找到通信模块-点到点-CM1241(RS485),加入CM1241通信模块。

图3-4
双击设备视图中的RS485端口,设置端口组态,本例程配置如下图。

图3-5
在左侧的项目树-设备-在线访问-Broadcom NetXtreme。。。(本例程PC机所使用的网卡),双击更新可使用的设备,搜索到连接的设备。

图3-6
3.3 编程
在左边的设备中找到S7-1200/程序块,打开主程序(Main[OB1])。在右边的指令栏里选择通信/通信处理器/MODBUS,添加MB_COMM_LOAD和MB_MASTER。

图3-7
在弹出的调用选项中,定义一个背景数据块。
 西门子22千瓦变频器MM430图3-8
西门子22千瓦变频器MM430图3-8
使用同样的方法,再加入一个MB_MASTER模块,同样定义背景数据块。

图3-9
分别按照图3-10、图3-11设置MB_COMM_LOAD和MB_MASTER模块。

图3-10
图3-11
其中,MB_COMM_LOAD与MB_MASTER指令的参数说明,请参考表3-1,表3-2。
表3-1 MB_COMM_LOAD指令的参数
| 参数 | 声明 | 数据类型 | 存储区 | 说明 |
| REQ | Input | BOOL | I、Q、M、D、L | 在上升沿执行指令 |
| PORT | Input | UINT | I、Q、M、D、L 或常量 | 通信端口的 ID: 在设备组态中插入通信模块后,端口 ID 就会显示在 PORT 框连接的下拉列表中。 也可以在变量表的“常量” (Constants) 选项卡中引用该常量。 |
| BAUD | Input | UDINT | I、Q、M、D、L 或常量 | 波特率选择: 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 76800, 115200 所有其它值均无效。 |
| PARITY | Input | UINT | I、Q、M、D、L 或常量 | 奇偶校验选择: 0 – 无 1 – 奇校验 2 – 偶校验 |
| FLOW_CTRL | Input | UINT | I、Q、M、D、L 或常量 | 流控制选择: 0 –(默认值)无流控制 1 – 通过 RTS 实现的硬件流控制始终开启(不适用于 RS485 端口) 2 - 通过 RTS 切换实现硬件流控制 |
| RTS_ON_DLY | Input | UINT | I、Q、M、D、L 或常量 | RTS 延时选择: 0 -(默认值)到传送消息的个字符之前,激活 RTS 无延时。 1 至 65535 – 到传送消息的个字符之前,“激活 RTS”以毫秒为单位的延时(不适用于 RS-485 端口)。应用 RTS 延时必须与 FLOW_CTRL 选择无关。 |
| RTS_OFF_DLY | Input | UINT | I、Q、M、D、L 或常量 | RTS 关断延时选择: 0 –(默认值)传送后一个字符到“取消激活 RTS”之间没有延时。 1 至 65535 – 在发送消息的后一个字符到“取消激活 RTS”之间以毫秒为单位的延时(不适用于 RS-485 端口)。应用 RTS 延时必须与 FLOW_CTRL 选择无关。 |
| RESP_TO | Input | UINT | I、Q、M、D、L 或常量 | 响应时: “MB_MASTER”允许等待从站响应的时间(毫秒) 如果从站在此时间内没有响应,则“MB_MASTER”将重复该请求,或者在发送了数目的重试后终止请求并返回错误。 5 ms 至 65535 ms(默认值 = 1000 ms)。 |
| MB_DB | Input | VARIANT | D | “MB_MASTER”或“MB_SLAVE”指令的背景数据块的引用。 在程序中插入“MB_SLAVE”或“MB_MASTER”之后,数据块标识符会显示在 MB_DB 框连接的下拉列表中。 |
| DONE | Output | BOOL | I、Q、M、D、L | 指令的执行已完成且未出错。 |
| ERROR | Output | BOOL | I、Q、M、D、L | 错误: 0 – 未检测到错误 1 – 表示检测到错误。 在参数 STATUS 中输出错误代码。 |
| STATUS | Output | WORD | I、Q、M、D、L | 端口组态错误代码 |
表3-2 MB_MASTER指令的参数
| 参数 | 声明 | 数据类型 | 存储区 | 说明 |
| REQ | Input | BOOL | I、Q、M、D、L | 请求输入: 0 – 无请求 |
