西门子6SL3210-1KE11-8AB2代理商
西门子6SL3210-1KE11-8AB2代理商
西门子6SL3210-1KE11-8AB2代理商
 | SINAMICS G120C 标称功率 0.55kW 有 150% 过载 3 秒 380-480V+10/-20% 三相交流 47-63Hz A 级集成滤波器 I/O-接口:6DI, 2DO,1AI,1AO 集成式安全转矩切断 现场总线集成: USS/MODBUS RTU; 防护等级 IP20/UL Open Typ 尺寸:FSAA 173x 73x 155 (高x宽x深) 外部 24V |
SIEMENS(西门子销售中心)
上海西邑电气技术有限公司
zx-plc.com )
联系人:万紫云(销售经理)

6FC5373-0AA30-0AA0SINUMERIK 840D SL NCU730.3PN 带 PLC 317-3PN/DP 用户存储器: CNC:3MB;PLC:512KB 内部热散逸
1.S7-PDIAG软件简单介绍
诊断消息用于指示操作人员系统当前的运行状态和故障的位置及原因。通常情况下取PLC中的一个位信号作为触发信号,在HMI中设置相应的报警文本,当信号为1时,表示有故障,弹出设置的报警文本,当信号为0时,故障消除,报警文本显示故障消除并归档,这样的报警消息由HMI扫描PLC中故障位的状态,占用大量的通信负荷,同样通过符号表产生的消息同样由CPU扫描消息触发位信号,如图1所示,消息的类型为“SCAN”,扫描的间隔可以设定。
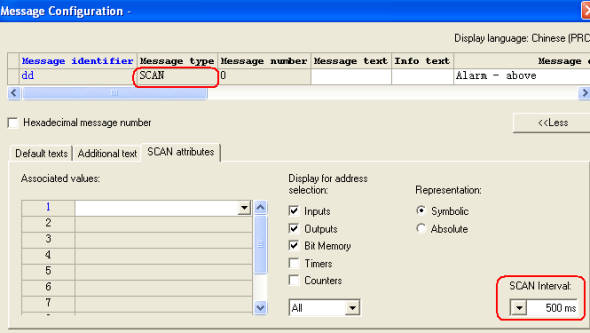
图1 由符号表产生的消息
采用与程序块调用等相关的报警消息由PLC触发(例如调用SFB34、35或SFC17、18、107、108等发送消息,S7-400 CPU支持SFB的调用)只有当故障触发时才发送报警消息,由于PLC与HMI集成在一个项目下,PLC中定义文本消息存储于HMI中,故障触发时只发送位状态而不发送整个文本消息,减少通信负荷,消息的类型为“ALARM_X”(X:为S、8、8P等不同的子类型),如图2所示:
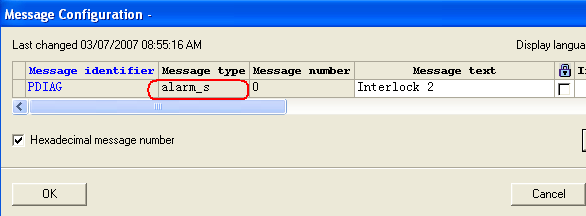
图2 块调用产生的消息
S7-PDIAG软件通过内部调用系统函数SFC17、18、107、108完成消息的传送(SFC107、108替代SFC17、18,与之相比带有通信资源管理功能)。
2.S7-PDIAG软件诊断功能的种类
S7-PDIAG包含三种诊断功能,分别是地址监控(Address monitoring)、全局监控(global monitoring或General monitoring)和运动监控(Motion monitoring),下面分别介绍这三种诊断功能。
2.1 地址监控
地址监控功能监控一个位信号的状态变化,可以设定一个沿信号和电平信号,设置界面如图3所示:
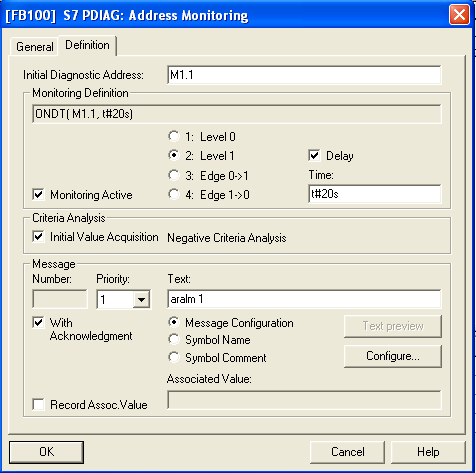
图3 地址监控功能设置界面
在“Initial Diagnostic Address”设置监控的地址,如M1.1,然后选择监控的信号,如沿信号和电平信号,如果激活“Delay”功能,则需要设定相应的延迟时间,表示如果监控信号变化,将延迟设定的时间后触发,S7-PDIAG在程序内部调用SFC64,时间格式为IEC标准,例如T#1H19M12S100MS 表示的时间值为1小时19分12秒100毫秒,配置的延时定时器的个数没有限制。在“Meassage”栏中设定信号触发的消息和优先级,配置完成后点击“OK”键确认。
2.2 全局监控
全局地址监控功能监控一个表达式,如果表达式结果为1则触发消息,设置界面如图4所示:
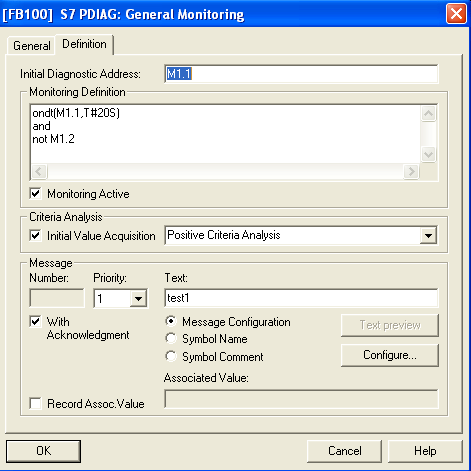
图4 全局监控功能设置界面
在“Initial Diagnostic Address”设置监控的初始地址,如M1.1,在“Monitoring Definition”中定义事件触发的条件,触发条件必须使用S7-PDIAG语言编写,S7-PDIAG语言包含下列基本指令:
AND 与操作,例如表达式为 M1.1 AND M1.2,如果M1.1与M1.2为1,表达式结果为1;
ONDT 执行信号ON延时,例如表达式为ONDT(M1.1,T#2S),如果M1.1为1并延时2秒后表达式结果为1;
EN 存入下降沿结果,例如表达式为EN(M1.1),M1.1产生下降沿时表达式结果为1,M1.1再次为1时,表达式结果为0;
EP存入上升沿结果,与EN相反;
NOT 取反,例如表达式为NOT M1.1, 如果M1.1为0时表达式结果为1;
OR 或操作,例如表达式为 M1.1 OR M1.2,如果M1.1与M1.2其中一个为1,表达式结果为1;
SRT置位复位延时,例如表达式为SRT(M1.1,M1.2 T#2S),如果M1.1为1(沿信号)2秒后,表达式结果为1,如果如果M1.1再次为1,表达式结果为0,2秒后表达式结果为1,如果M1.2为1(沿信号),表达式结果为0。
XOR异或,例如表达式为M1.1 XOR M1.2,当M1.1与M1.2不相同时表达式结果为1。
如果在一个表达式中使用多个指令,指令的优先级参考表1
表1: S7-PDIAG 指令优先级
| 指令 | 优先级 |
| () | 1 |
| EP, EN, ONDT, SRT | 2 |
| NOT | 3 |
| AND | 4 |
| XOR | 5 |
| OR | 6 |
在“Meassage”栏中设定信号触发的消息和优先级,配置完成后点击“OK”键确认。
2.3 运动监控
运动监控对用户编写的定位过程进行监控,运动监控有下列几种监控方式:
1)执行监控(Action Monitoring)
当启动命令执行后,在设定的时间内没有到达定位的位置(限位信号),触发消息的生成。执行监控的设置界面如图5所示:

图5 运动监控-执行监控功能设置界面
执行监控界面中使用S7-DIAG语言预先设定触发条件并不可以修改,如图5中,如果M1.2为1(执行),20秒后M1.1(限位开关)没有到达,触发报警消息。
2)启动监控(Startup Monitoring)
如果启动命令发出后,在设定的时间内没有动作,则触发消息,这与用户生成的启动失败的报警过程相同,启动监控的设置界面如图6所示:
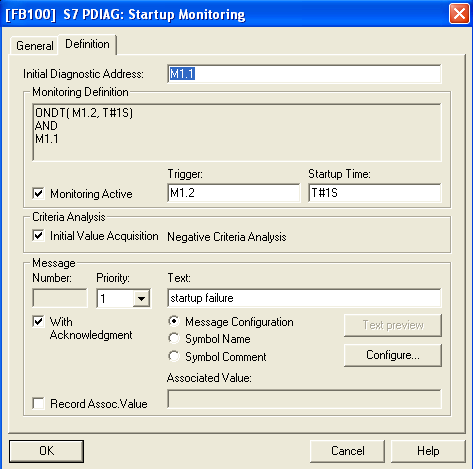
图6 运动监控-启动监控功能设置界面
启动监控界面中使用S7-DIAG语言预先设定触发条件并不可以修改,如图6中,如果M1.2为1(执行),1秒后M1.1(限位开关)为1(物体没有移动),触发报警消息。
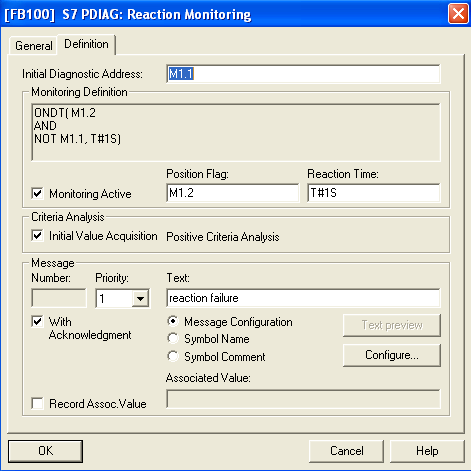
3)定位监控(Reaction Monitoring)
当定位任务完成后但是并没有达到要求的位置,在设定的时间延时后触发报警消息,满足定位范围需要附加的限位开关,定位监控的设置界面如图7所示:
6ES72881SR200AA0 S7-200 SMART,CPU SR20,标准型 CPU 模块,继电器输出,220 V AC 供电,12 输入/8 输出
6ES72881ST200AA0 S7-200 SMART,CPU ST20,标准型 CPU 模块,晶体管输出,24 V DC 供电,12 输入/8 输出
6ES72881SR300AA0 S7-200 SMART,CPU SR30,标准型 CPU 模块,继电器输出,220 V AC 供电,18 输入/12 输出
6ES72881ST300AA0 S7-200 SMART,CPU ST30,标准型 CPU 模块,晶体管输出,24 V DC 供电,18 输入/12 输出
6ES72881SR400AA0 S7-200 SMART,CPU SR40,标准型 CPU 模块,继电器输出,220 V AC 供电,24 输入/16 输出
6ES72881ST400AA0 S7-200 SMART,CPU ST40,标准型 CPU 模块,晶体管输出,24 V DC 供电,24 输入/16 输出
6ES72881SR600AA0 S7-200 SMART,CPU SR60,标准型 CPU 模块,继电器输出,220 V AC 供电,36 输入/24 输出
6ES72881ST600AA0 S7-200 SMART,CPU ST60,标准型 CPU 模块,晶体管输出,24 V DC 供电,36 输入/24 输出
6ES72881CR400AA0 S7-200 SMART,CPU CR40,经济型 CPU 模块,继电器输出,220 V AC 供电,24 输入/16 输出
6ES72881CR600AA0 S7-200 SMART,CPU CR60,经济型 CPU 模块,继电器输出,220 V AC 供电,36 输入/24 输出
6ES72882DE080AA0 S7-200 SMART,EM DI08,数字量输入模块,8 x 24 V DC 输入
6ES72882DR080AA0 S7-200 SMART,EM DR08,数字量输出模块,8 x 继电器输出
6ES72882DT080AA0 S7-200 SMART,EM DT08,数字量输出模块,8 x 24 V DC 输出
6ES72882DR160AA0 S7-200 SMART,EM DR16,数字量输入/输出模块,8 x 24 V DC 输入/8 x 继电器输出
