天水西门子通讯模块代理商
这里介绍了SINAMICS S120所支持的通讯功能,包括PROFIBUS DP、PROFINET、SINAMICS Link和CANopen。

SINAMICS S120 使用控制单元CU320-2 DP时支持基于PROFIBUS的周期性数据交换与非周期性数据交换:
---通过循环数据通道进行周期性数据交换:驱动系统运行中需要循环更新的数据用于开环和闭环控制。这些数据必须作为设定值发送至驱动设备,或作为驱动设备实际值传输至上位控制器(例如PLC)。
---通过非循环通道进行非周期性数据传输:使用非循环参数通道进行控制系统 / 监视器和驱动设备之间的数据交换。
系统构成:一个 S7-300PLC,一个CU320-2 DP和一个书本型电机模块和一台异步电机组成,电机模块由单独的直流电源供电。

CU320-2配置
---设置PROFIBUS从站(CU320-2)的地址,请参考第4.2.2.1节;
---使用STARTER设置驱动对象的报文。
S7-300/400硬件组态
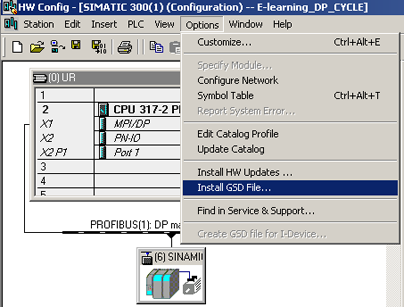
---1.安装GSD文件

---2.系统组态;
在PLC总线上插入设备对象。
在S7-300/400的硬件组态中设定的PROFIBUS地址应与驱动装置的PROFIBUS地址一致。

---3.报文配置

PLC中配置的报文应与STARTER中配置的报文一致,两个驱动对象报文之间需要输入轴分隔符(Axis separator)。
4.保存、编译并下载至PLC。
详细的操作请参见视频《S7-300/400与S120通过DP通讯(周期通讯) 》:与《S7-300/400与S120通过DP通讯(非周期通讯) 》:
系统构成:一块S7-1200PLC,一块CM1243-5 PROFIBUS DP-MASTER模块、一个CU320-2 DP、一个书本型电机模块和一台异步电机,电机模块由单独的直流电源供电。

硬件的配置与示例1类似,详细的操作请参见以下视频《S7-1200与S120(CU320-2 DP)之间的通讯》:
相关文档:
A0075_通过DP总线实现S7-300400与SINAMICS S120的通讯
F0560_如何设置CU320-2 DP的PROFIBUS地址
F0573_如何安装使用SINAMICS S120 的GSD文件
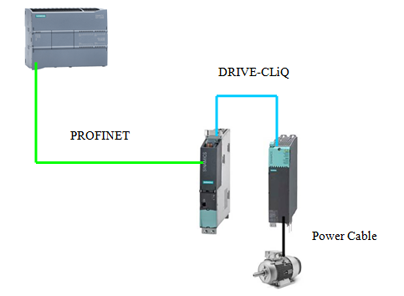
SINAMICS S120 使用控制单元CU320-2 PN或使用控制单元CU320-2 DP并加装CBE20通讯板时,支持基于PROFINET IO的周期性数据交换与非周期性数据交换。
系统构成:一块S7-300 PLC,一个CU320-2 PN、一个书本型电机模块和一台异步电机,电机模块由单独的直流电源供电。

CU320-2配置:
---设置CU的IP地址、设备名称
---配置驱动对象的报文
S7-300/400配置:
---安装GSD文件
---系统组态
---设置驱动对象名称和IP地址
---报文配置
---保存、编译并下载至PLC
PLC的编程:
---周期性通讯:使用能块SFC14读取PROFINET IO从站的过程数据,SFC15将过程数据写入PROFINET IO从站
---非周期性通讯:使用功能块SFB53写入读写请求报文,使用SFB52读取返回报文
详细配置请参见视频《通过PROFINET实现S7-300/400与S120之间的通讯 》
系统构成:一块S7-1200PLC,一个CU320-2 PN、一个书本型电机模块和一台异步电机,电机模块由单独的直流电源供电。
硬件的配置与示例1类似,详细的操作请参见以下视频《S7-1200与S120(CU320-2 PN)之间的通讯》:
相关文档:
A0078_SINAMICS ProfiDrive入门
A0162_通过PROFINET实现S7-300400与SINAMICS S120 通讯
A0607_通过PROFINET实现S7-1200与SINAMICS S120 通讯
A0644_SIMATIC 和 SINAMICS S120 之间的 PROFINET IRT 通讯
F0573_如何安装使用SINAMICS S120 的GSD文件
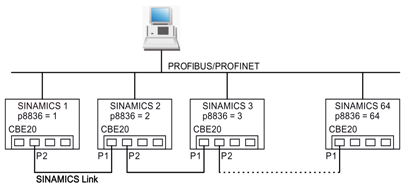
SINAMICS Link 用于控制单元之间的通讯,它支持多 64 个CU320-2 PN或CU320-2 DP以及CUD间的直接数据交换。SINAMICS Link功能需要附加模块CBE20 ,所有参与数据交换的控制单元都必须配备一个CBE20 。此方案例如可用于:
---多个驱动装置之间的转矩分配
---多个驱动装置之间的设定值层叠
---物料线驱动装置之间的负载分配
---整流单元的主 / 从控制功能
---SINAMICS DC MASTER和SINAMICS S12之间的连接
前提条件:
---r2064[1]:总线循环时间(Tdp)必须为 p0115[0](电流控制器周期)的整数倍
---r2064[2]:主站循环时间(Tmapc)必须为 p0115[1](转速控制器周期)的整数倍。
---电流控制器周期必须设为 250 μs 或 500 μs,使用 SINAMICS Link 时传输时间可达 1000 μs。
总线周期和节点数量
---SINAMICS Link 的总线周期可与电流控制器周期同步或不同步
---同步运行,可实现多 16 个节点之间的通讯
---非同步运行,实现多 64 个 节点之间的通讯
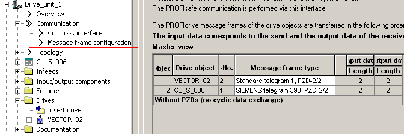
发送与接收
---SINAMICS Link 的报文为16个固定的过程数据空间(PZD)
---每个PZD 为一个字节长度,不需要的部分填零
---每个 SINAMICS Link 节点可在一个传输周期发送 16 PZD 的报文
---每个节点会接收发出的所有报文,在一个传输周期可从接收的所有报文中选出 16 PZD 进行编辑
---可接收或发送单字和双字, 双字必须写为 2 个连续的 PZD

拓扑结构
---节点号按照顺序输入到参数p8836[0...63] 中,节点号必须连续
---节点号为 1 自动设为通讯连接的主机
---通讯配置:NameOfStation (SINAMICSxLINKx001 …SINAMICSxLINKx064) 和 IP 地址 (1 … 4) 自动设置,无法改变
---CBE20 端子必须按照上图连接,Port 2 (P2) 是连接到下一节点的 Port 1 (P1)
配置

SINAMICS Link的详细配置与调试,请参见视频《SINAMICS LINK 通讯配置与实现》
相关文档
A0556_如何通过 SINAMICS Link 实现CU320间的通讯
SINAMICS S120 的控制单元CU320-2加装CBC 10通讯板时,支持CAN 总线通讯。调试 CANopen 接口时的硬件和软件配置如下图所示:
---CANopen 用户主站应用与 SINAMICS 驱动组之间的连接。
---通讯板 “CBC10” 的 CAN 总线接口。
---控制单元上的相关 CANopen 从站软件,以及调试时用于发送和接收报文的术语“发送”和“接收”的含义。
---安装了调试工具 STARTER 的 PC,通过以太网接入。
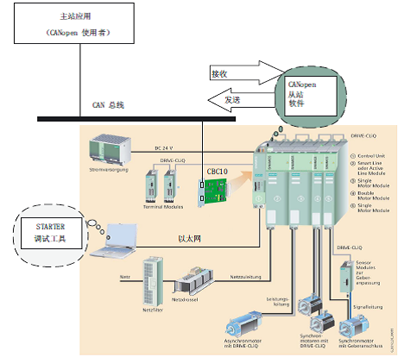
关于CANopen通讯的详细介绍,请参见以下手册《SINAMICS 调试手册 CANopen 接口》。

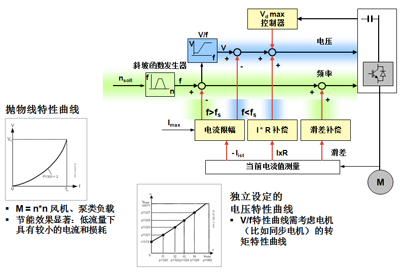
V/f 控制用于简单传动的标准解决方案:
---用于联动装置
---用于电机额定功率小于 25% 的变频器额定功率
---用于调试过程中的测试运行

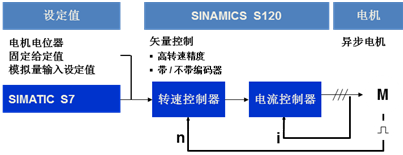
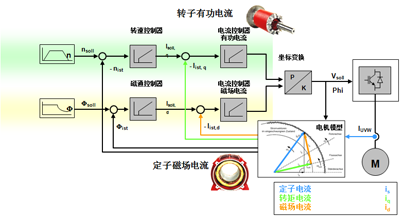
矢量控制的优势:
---高稳定性运行,无论负载波动或给定值变化
---给定值变化时能快速响应(→ 优异的控制特性)
---负载波动时能够快速调节(→ 优异的抗干扰性)
---能以大转矩进行加速和制动
---转矩的闭环控制,制动转矩值与当前转速无关
---零速时也可以输出大制动转矩
---闭环控制的范围:转速大于 1% 额定转速
相关文档
F0515_SINAMICS S120变频器可否在VF控制方式下实现一拖多
带编码器的矢量控制(VC):
---要求高转速精度
---要求高动态响应(给定变化或负载扰动时)
---要求转矩的调节范围大于 1:20
不带编码器的矢量控制(SLVC):
---用于大功率、独立运行的异步电机
---适合各种动态响应要求
---转速调节范围在 1:20 之内(> 5% 额定转速)
------实际磁通或即电机的实际转速仅通过一个电机模型
------电机模型借助电流和电压进行计算
------在0 Hz 左右的低频区内,模型无法足够地计算出电机转速。 因此在低频范围内矢量控制会从闭环切换为开环
不带编码器的运行在多数情况下可以实现高性能、稳定运行的矢量控制,如果需要在小于 1% 的额定转速下调速或更高度的要求,需要使用带编码器的矢量控制
SLVC 或 VC 时可通过参数 p1501 切换至转矩控制,或直接通过参数 p1300 设置。转矩控制时,需要通过转矩设定值仅在转矩控制时生效,附加转矩在转矩控制和转速控制时都生效。
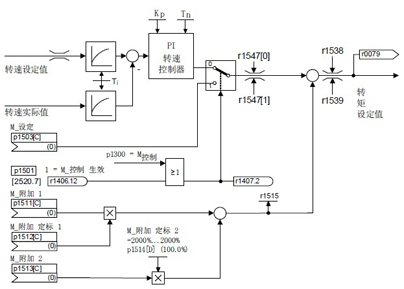
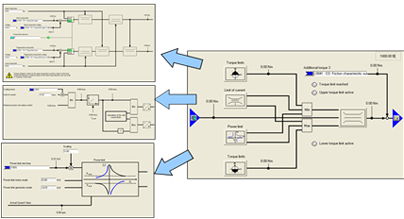
为了限制电机轴上的输出转矩,保护机械设备的安全,转矩设定值的限制可以通过三种实现方式:
---转矩限幅(正反两个方向)
---电流限幅:默认值为变频器额定电流的1.5倍
---功率限幅(电动运行、发电运行)
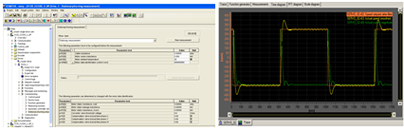
电机的矢量控制需要借助电机模型来计算磁通矢量,因此需要对电机的参数(等效电路图)进行准确计算,这一过程可以通过SINAMICS S120的电机数据辨识来完成。它包括以下三个过程:
---电机数据计算:根据电机铭牌计算电机参数
---静态辨识 :电机等效电路图数据的识别与计算
---动态辨识
------旋转磁场测量:动态优化矢量的磁场模型
------速度环优化:速度调节器PI系数优化
相关文档
F0685_S120转矩限幅功能
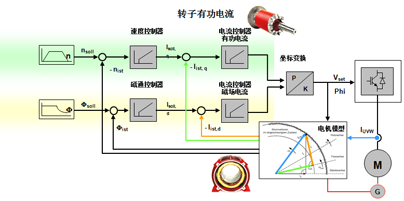
伺服控制用于高精度、高动态的电机运行(带电机编码器),下面的表格为伺服控制与适量控制的比较。
| 主题 | 伺服控制 | 矢量控制 |
|---|---|---|
| 典型应用 |
具有高动态运行控制特性的驱动 具有高转速精度和转矩精度的驱动(伺服同步电机) 和等时同步的 PROFIdrive 实现角同步 机床和周期性生产机械 |
具有高转速精度和转矩精度、采用转速控制和转矩控制的驱动,特别是在没有编码器的运行中 |
| 动态响应 | 高 | 中等 |
| 可以连接的电机 |
同步伺服电机 永磁同步电机 异步电机 转矩电机 |
同步电机(包含转矩电机) 永磁同步电机 异步电机 磁阻电机(仅适用于 V/f 控制) 外部励磁的同步电机 提示:不可连接 1FT6、1FK6 和 1FK7 系列的同步电机 |
| 无编码器的转速控制 | 支持,从 10 % 电机额定转速起生效,在此转速下为开环控制运行 | 支持,对异步电机(ASM)和永磁同步电机(PEM)从静止状态起生效 |
| 无编码器的转矩控制 | 不支持 | 支持,从 10 % 电机额定转速起生效,在此转速下为开环控制运行 |
| 异步电机的弱磁区域 |
≤ 16 x 弱磁起始转速(带编码器) ≤ 5 x 弱磁起始转速(不带编码器) |
≤ 5 x 电机额定转速 |
| 闭环控制中的大输出频率 |
31.25 μs / 16 kHz 时为 2600Hz 62.5 μs / 8 kHz 时为 1300 Hz 125 μs / 4 kHz 时为 650 Hz 250 μs / 2 kHz 时为 300 Hz |
250 μs / 4 kHz 400 μs / 5 kHz 时为 300 Hz 500 μs / 4 kHz 时为 240 Hz |
| 功率单元的并联 | 不支持 |
书本型:不支持 装机装柜型:支持 |
| 一个控制单元可以控制的驱动大数量 |
1 电源 + 6 驱动(在电流控制器采样率为125 μs 及转速控制器采样率为125 μs 时) 1 电源 + 3 驱动(在电流控制器采样率为62.5 μs 及转速控制器采样率为62.5 μs 时) 1 电源 + 1 驱动(在电流控制器采样率为31.25 μs 及转速控制器采样率为 62.5 μs 时) 混合运行,125 μs 下的伺服控制和 V/f 控制,多 11 驱动 |
1 电源 + 3 驱动(在电流控制器采样时间为250 μs 及转速控制器采样时间为1 ms 时) 1 电源 + 6 驱动(在电流控制器采样时间为400 μs / 500 μs 及转速控制器采样时间为 1.6 ms/2 ms 时) V/f 控制:1 电源 + 12 驱动(在电流控制器采样时间为500 μs 及转速控制器采样时间为2000 μs 时) 混合运行,500 μs 下的矢量控制和 V/f 控制,多 11 驱动 |

SINAMICS S120在矢量控制模式下,默认激活扩展的设定值通道(伺服模式下默认不激活)。在扩展的设定值通道中,可以对各个设定值源发出的、用于电机控制的设定值进行处理,它包括:
---主设定值/附加设定值,设定值比例系数
---方向限制和换向
---跳转频带和设定值限制
---斜坡函数发生器

SINAMICS S120的速度设定值可以通过以下方式进行设置:
---固定设定值
------通过选择位 p1020 … p1023 可以选择零速和其他15个固定设定值(通过参数 p1001 ... p1015预先设定)
------16个固定设定值中被选中的数值被传递到 r1024 , 它将作为固定设定值进入下一级控制器
------参数 r1197 显示当前速度固定设定值的编号
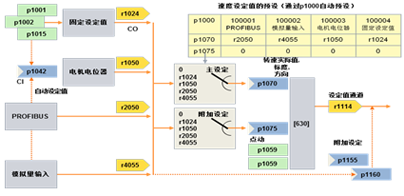
---电机电位器
------通过电机电位计的上升和下降按键,可以从远程来设定驱动装置的转速,电动电位计的上升和下降可以通过数字量输入端子来实现
------此外,也可以切换到“自动设定值”来给定速度设定值

---上位机的 PROFIBUS / PROFINET 报文
---模拟量输入(借助端子扩展板或端子扩展模块)
------模拟量输入 AI 0 / AI 1 可以自行设定信号类型和标度
------模拟量输入选择 4..20mA 信号时带有断线监控
------通过图形化界面便捷地设置

---附加设定值可用于添加来自下级控制系统的补偿值
---两个变量通过两个独立的或一个设定值源同时读入,并在设定值通道中相加
---主设定/附加设定通道可独立设置比例系数

旋转方向可以通过参数进行限制:设定值取反、禁止正 / 负旋转方向

另外,在设定值不变的情况下,也可以通过参数实现方向反转:
---变频器输出反向 p1820 -> 无需交换电机电缆相序实现速度给定值反向
---编码器反馈值反向 p0410 -> 无需交换编码器信号线实现速度实际值反向
---变频器输出、编码器反馈同时反向 p1821 -> 同时实现速度给定值及实际值反向
为了限制电机轴上的输出速度,保护机械设备的安全,需要速度设定值进行限制。同时,在 一个驱动支路上(如电机、联轴器、芯轴、机械设备)可能有一个或多个共振点, 这些共振点会导致振动。 此时,可通过设置跳转频带回避机械上的一个或多个共振点。

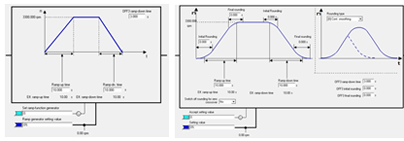
斜坡功能发生器可以在设定值剧烈变化时限制加速度,从而避免整个驱动支路上出现负载冲击。斜坡函数发生器有两种类型:
基本斜坡函数发生器,具有
---上升和下降斜坡
---用于紧急停机(OFF3)的下降斜坡
---可通过参数 p1145 设置的跟踪功能
---斜坡函数发生器的设置值
扩展斜坡函数发生器还具有
---起始圆弧和结束圆弧

通过该功能可以控制外部的电源接触器。 电源接触器的闭合/断开可以通过分析电源接触器的反馈触点加以监控。
对于书本型 SINAMICS S120,可以设置如下参数对进线接触器进行控制:
---驱动对象 INFEED 或 SERVO/VECTOR 上的位 r0863.1来控制进线接触器;
---p0860 可设置反馈信号源(非必须,进线接触器没有正确闭合会触发预充电故障);
---p0861 设置电源接触器监控时间。
对于装机装柜型整流装置,通过内部逻辑控制的端子X9 控制进线接触器:
BLM
---启动后,经过 p0861 的延时,X9.5/X9.6(通过内部逻辑)控制进线接触器自动吸合;
---晶闸管调整导通角完成预充电,装置运行。

SLM & ALM
---启动后,预充电接触器自动吸合,通过电阻进行预充电
---预充电完成,X9 (通过内部逻辑)控制进线接触器自动吸合
---预充电接触器自动打开
---完成预充电,装置运行

相关文档
A0589_SINAMICS S120书本型进线模块预充电回路和接线方式介绍
A0597_SINAMICS S120装机装柜型进线模块预充电回路和接线方式介绍
F0477_SINAMICS S120大功率整流回馈单元SLM 进线断路器的联锁控制
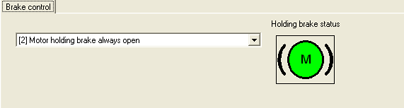
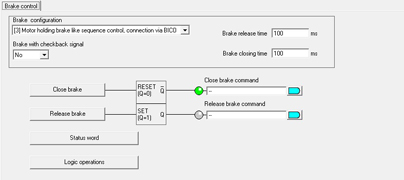
SINAMICS S120 的抱闸控制分为简单抱闸控制和扩展抱闸控制:
---按照驱动顺序控制开关抱闸(适合水平运动带抱闸系统)

---始终打开抱闸(测试/去除抱闸的作用)
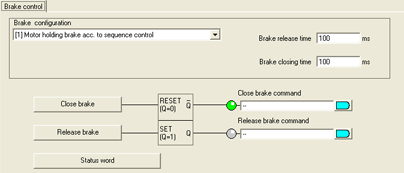
---扩展抱闸功能(提升或对开关抱闸有特殊的要求)
相关文档
F0619_S120 简单抱闸控制
SINAMICS S120 的集成安全功能可以有效保护人身和机械设备安全,它包括基本集成安全功能和扩展集成安全功能两种:
基本安全功能:包含在装置供货范围内,无需额外授权
---安全扭矩断开(STO)
---安全停机1(SS1,时间控制)
---安全制动控制(SBC)
扩展安全功能:根据所需控制轴数,额外订购相应数量的安全授权
---安全扭矩断开(STO)
---安全停机1(SS1,时间和加速控制)
---安全停机2(SS2)
---安全运行停止(SOS)
---安全限速(SLS)
---安全速度监控(SSM)
---安全方向(SDI)

集成安全功能的控制方式:
| PROFIsafe安全协议 | 控制单元或功率单元上的端子 | TM54F | |
|---|---|---|---|
| 基本功能 | 是 | 是 | 否 |
| 扩展功能 | 是 | 否 | 是 |
相关文档
集成安全功能的介绍,请参见产品目录D21.3.CN.2012第2/6 – 2/9页:
http://www.ad.siemens.com.cn/download/docMessage.aspx?Id=4149
详细使用请参见手册《Safety Integrated 功能手册》:
此功能将电机模块自行切换到一个正在旋转的电机上。例如在设备故障恢复后,此时电机仍然在旋转(通常大转动惯量),通过该功能可以自动搜索当前转速,并从该值起加速到终的转速设定值,从而防止发生过流的情况。此功能可在带/无编码器运行中激活。捕捉再启动的顺序为:
1.通过参数 p1200 激活“捕捉重启”;
| p1200 | 捕捉再启动的方式 |
|---|---|
| 0 | 未激活(默认值) |
| 1 | 是有效(在设定值方向启动) |
| 2 | 在接通/ 故障/OFF2 后有效(在设定值方向启动) |
| 3 | 在故障/OFF2 后有效(在设定值方向启动) |
| 4 | 是有效(仅在设定值方向启动) |
| 5 | 在接通/ 故障/OFF2 后有效(在设定值方向启动) |
| 6 | 在故障/OFF2 后有效(仅在设定值方向启动) |
2.如果使用的是异步电机,必须在查找电机前经历一段去磁时间。 在无编码器运行中,首先搜索当前转速。 搜索从大转速 + 25% 的转速开始。在带编码器运行中,即实测转速实际值,会省略搜索这一过程。
3.使用异步电机时,确定转速后会立即首行励磁(p0346)。
4.斜坡功能发生器中的当前转速设定值被设为当前的转速实际值。

自动重启功能会自动启动驱动装置,例如在电源断电后再次恢复时。 此时会自动应答所有现有的故障,重新给驱动通电。 该功能的应用并不只限于电源故障,因此也可用于由任意故障导致的断路,以便自动应答故障,重新启动电机。 自动重启的模式有:
| p1210 | 自动重启的方式 |
|---|---|
| 0 | 应答所有故障,无自动重启(默认值) |
| 1 | 应答所有故障,无自动重启 |
| 4 | 在电源掉电后自动重启,如果失败不继续尝试重启 |
| 6 | 出现故障后自动重启,如果失败会继续尝试自动重启 |
| 14 | 在电源掉电、手动应答故障信息后自动重启 |
| 16 | 在出现故障、手动应答故障信息后自动重启 |
如果需要将驱动切换到一个正在旋转的电机芯轴上,可以通过 p1200 激活“捕捉重启”功能。 必须确保自动重启开始前电源上存在可用的供电电压。在电源故障恢复后,驱动装置自动应答所有现有故障,并重新启动。

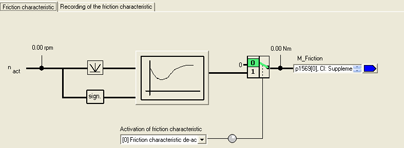
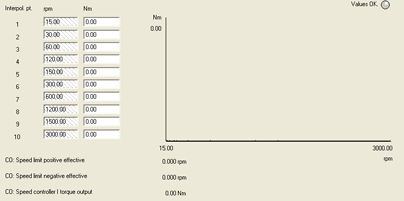
摩擦特性曲线可以补偿电机和工作设备产生的摩擦转矩。 借助它可以预先调节转速控制器,优化它的控制性能,通常在严格要求转矩控制的场合。它的特性为
---一共有 10 个支点构成一条摩擦特性曲线
---具备一个自动功能可以记录摩擦特性曲线(摩擦特性曲线记录)
---模拟量互联输出 (r3841)可以作为摩擦转矩(p1569)接入
可以激活并取消摩擦特性曲线(p3842)

如果在直流母线中存在过压或欠压,可以采取相应措施激活“Vdc 控制”功能。
---直流母线中的过压
典型原因:驱动回馈式运行,供给直流母线的电能过多。
解决办法:自行延长驱动的减速时间,降低再生转矩,将直流母线电压限制在1允许值范围内——大 Vdc 控制器
---直流母线中的欠压
典型原因:电源断电或直流母线电源断电。
解决办法:为正在运行的驱动产生一个再生转矩,以补偿现有的电能损耗,从而稳定直流母线中的电压——小 Vdc 控制器(动能缓冲)

