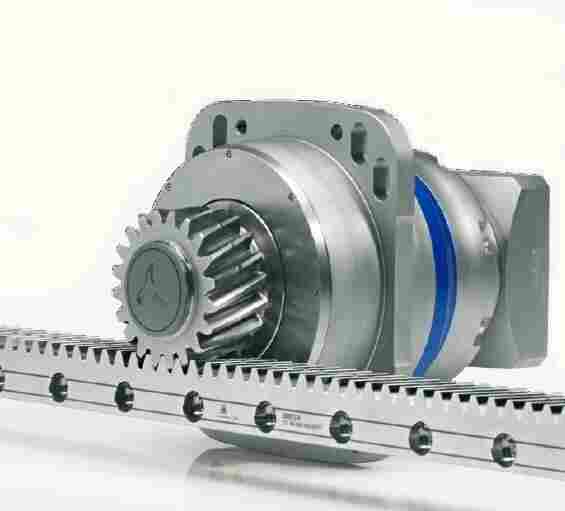
K90-25-P1产品展示
K90-25-P1由伊明传动(厦门)有限公司进口供应K90-25-P1 众所周知,一台机器通常由三个根本局部组成:即动力机、减速机安装和工作机构。此外,依据机器工作需求,可能还有控斜和光滑、照明等辅助。机械减速机安装是指将动力机产生的机械能以机械的传送到工作机构上去的中间安装。机械减速机安装能分别起以下作用: 1)改动动力机的输出速度(减速、增速或变速),以工作机构的工作需求; 2)改动动力机输出的转矩,以工作机构的请求; 3)把动力机输出的运动转变为工作机构所需的运动〔如将运动改动为直线运动,或反之)。 4)将一个动力机的机械能传送到数个工作机构,或将数个动力机的机械能传送到一个工作机构。 5)其他的特殊作用,如有利于机器的装配、装置、和平安等而采用机械减速机安装。 齿轮减速机运用和

WPLS60-3-S2-P2 WPLS60-4-S2-P2 WPLS60-5-S2-P2 WPLS60-7-S2-P2 WPLS60-8-S2-P2 WPLS60-10-S2-P2 WPLS60-12-S2-P2 WPLS60-16-S2-P2 WPLS60-20-S2-P2 WPLS60-25-S2-P2 WPLS60-28-S2-P2 WPLS60-32-S2-P2 WPLS60-35-S2-P2 WPLS60-40-S2-P2 WPLS60-50-S2-P2 WPLS60-64-S2-P2 WPLS60-70-S2-P2 WPLS60-80-S2-P2 WPLS60-100-S2-P2 WPLS60-60-S2-P2 WPLS60-80-S2-P2 WPLS60-120-S2-P2 WPLS60-125-S2-P2 WPLS60-140-S2-P2 WPLS60-160-S2-P2 WPLS60-175-S2-P2 WPLS60-200-S2-P2 WPLS60-250-S2-P2 WPLS60-256-S2-P2 WPLS60-280-S2-P2 WPLS60-320-S2-P2 WPLS60-350-S2-P2 WPLS60-400-S2-P2 WPLS60-500-S2-P2 WPLS60-512-S2-P2 WPLS90-3-S2-P2 WPLS90-4-S2-P2 WPLS90-5-S2-P2 WPLS90-7-S2-P2 WPLS90-8-S2-P2 WPLS90-10-S2-P2 WPLS90-12-S2-P2 WPLS90-16-S2-P2 WPLS90-20-S2-P2 WPLS90-25-S2-P2 WPLS90-28-S2-P2 WPLS90-32-S2-P2 WPLS90-35-S2-P2 WPLS90-40-S2-P2 WPLS90-50-S2-P2 WPLS90-64-S2-P2 WPLS90-70-S2-P2 WPLS90-80-S2-P2 WPLS90-100-S2-P2 WPLS90-60-S2-P2 WPLS90-80-S2-P2 WPLS90-120-S2-P2 WPLS90-125-S2-P2 WPLS90-140-S2-P2 WPLS90-160-S2-P2 WPLS90-175-S2-P2 WPLS90-200-S2-P2 WPLS90-250-S2-P2 WPLS90-256-S2-P2 WPLS90-280-S2-P2 WPLS90-320-S2-P2 WPLS90-350-S2-P2 WPLS90-400-S2-P2 WPLS90-500-S2-P2 WPLS90-512-S2-P2 K90-25-P1
步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品,随着微电子和计算机技术的发展,步进电机的需求量与日俱增,那么您知道步进电机在调节速度时的注意事项吗? 1、可以用数字直接进行开环控制,整个简单廉价,位移与输入脉冲数相对应,步距误差不长期积累,开环控制既简单又具有一定的精度;在要求更高精度时,也可以采用闭环控制。 2、由于步进电机无刷,因此本体部件少,可靠性高。易于起动,停止,正反转,速度响应性好;停止时一般有自锁能力。 3、步距角可在大范围内选择,在小步距情况下,能够在低转速下高转距运行,可以不经减速器直接驱动负载。速度可在相当宽范围内调节,可以用一台控制器同时控制几台步进电机完全同步运行。 4、步进电机带惯性负载能力较差,由于存在失步和共振问题,步进电机的加减速在不同的应用状态下,情况较为复杂。 步进电机驱动器原理在电机轴上所有的负载有两种,即阻尼转矩和惯量负载。这两种负载都要正确地计算,其值应下列条件当机床作空载运行时,在整个速度范围内,加在伺服电机轴上的负载转矩应在电机连续额定转矩范围内,即应在转矩速度特性曲线的连续工作区。 大负载转矩,加载周期以及过载时间都在提供的特性曲线的准许范围以内。步进电机驱动器原理在电机在加速/减速中的转矩应在加减速区(或间断工作区)之内。 步进电机驱动器原理对要求起,制动以及周期性变化的负载,必须检查它的在一个周期中的转矩均方根值。并应小于电机的连续额定转矩。步进电机驱动器原理在电机轴上的负载惯量大小对电机的灵敏度和整个伺服的精度将产生影响。通常,当负载小于电机转子惯量时,上述影响不大。 但当负载惯量达到甚至过转子惯量的5倍时,步进电机驱动器原理会使灵敏度和响应时间受到很大的影响。甚至会使伺服放大器不能在正常调节范围内工作。步进电机驱动器原理所以对这类惯量应避免使用。对伺服电机惯量Jm和负载惯量Jl之间的关系如下: 1≤Jl/Jm<5负载转矩的计算加到伺服电机轴上的负载转矩计算公式,因机械而异。

KGR142-3-P1 KGR142-4-P1 KGR142-5-P1 KGR142-6-P1 KGR142-7-P1 KGR142-8-P1 KGR142-9-P1 KGR142-10-P1 KGR142-12-P1 KGR142-14-P1 KGR142-16-P1 KGR142-18-P1 KGR142-20-P1 KGR180-3-P1 KGR180-4-P1 KGR180-5-P1 KGR180-6-P1 KGR180-7-P1 KGR180-8-P1 KGR180-9-P1 KGR180-10-P1 KGR180-12-P1 KGR180-14-P1 KGR180-16-P1 KGR180-18-P1 KGR180-20-P1 KGR220-3-P1 KGR220-4-P1 KGR220-5-P1 KGR220-6-P1 KGR220-7-P1 KGR220-8-P1 KGR220-9-P1 KGR220-10-P1 KGR220-12-P1 KGR220-14-P1 KGR220-16-P1 KGR220-18-P1 KGR220-20-P1 K90-25-P1

