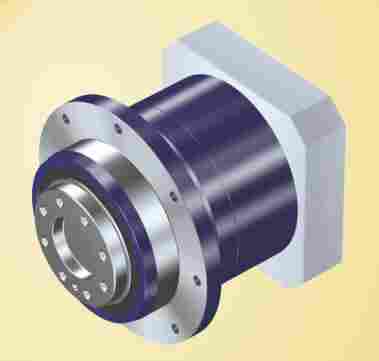
KSEL120-90-P2产品功能
KSEL120-90-P2由伊明传动(厦门)有限公司库存供应KSEL120-90-P2 齿轮箱是机械传动中广泛应用的重要部件,一对齿轮啮合时,由于不可避免地存在着齿距、齿形等误差,在运转中会产生啮合冲击而发生与齿轮啮合相对应的噪声,齿面之间由于相对也发生噪声。由于齿轮是齿轮箱传动中的基础零件,齿轮噪声对控制齿轮箱噪声十分必要。一般来说,齿轮噪声发生的原因主要有以下几个方面: 1.齿轮设计方面。 参数选择不当,重合度过小,齿廓修形不当或没有修形,齿轮箱结构不合理等。齿轮加工方面 基节误差和齿形误差过大,齿侧间隙过大,表面粗糙度过大等。 2. 齿轮系及齿轮箱方面。装配偏心,精度低,轴的平行度差,轴,轴承、支承的刚度不足,轴承的回转精度不高及间隙不当等。 3. 其他方面输入扭矩。负载扭矩的波动,轴系的扭振,电动机及其它传动副的平衡情况等
PS180L1-3-38-180 PS180L1-4-38-180 PS180L1-5-38-180 PS180L1-6-38-180 PS180L1-7-38-180 PS180L1-8-38-180 PS180L1-10-38-180 PS180L2-15-38-180 PS180L2-16-38-180 PS180L2-20-38-180 PS180L2-25-38-180 PS180L2-28-38-180 PS180L2-30-38-180 PS180L2-35-38-180 PS180L2-40-38-180 PS180L2-50-38-180 PS180L2-60-38-180 PS180L2-70-38-180 PS180L2-80-38-180 PS180L2-100-38-180 PS+060L1-3-14-50 PS+060L1-4-14-50 PS+060L1-5-14-50 PS+060L1-6-14-50 PS+060L1-7-14-50 PS+060L1-8-14-50 PS+060L1-10-14-50 PS+060L2-15-14-50 PS+060L2-16-14-50 PS+060L2-20-14-50 PS+060L2-25-14-50 PS+060L2-28-14-50 PS+060L2-30-14-50 PS+060L2-35-14-50 PS+060L2-40-14-50 PS+060L2-50-14-50 PS+060L2-60-14-50 PS+060L2-70-14-50 PS+060L2-80-14-50 PS+060L2-100-14-50 PS+075L1-3-14-50 PS+075L1-4-14-50 PS+075L1-5-14-50 PS+075L1-6-14-50 PS+075L1-7-14-50 PS+075L1-8-14-50 PS+075L1-10-14-50 PS+075L2-15-14-50 PS+075L2-16-14-50 PS+075L2-20-14-50 PS+075L2-25-14-50 PS+075L2-28-14-50 PS+075L2-30-14-50 PS+075L2-35-14-50 PS+075L2-40-14-50 PS+075L2-50-14-50 PS+075L2-60-14-50 PS+075L2-70-14-50 PS+075L2-80-14-50 PS+075L2-100-14-50 KSEL120-90-P2

步进电机是一种开环伺服运动执行元件,以脉冲进行控制,输出角位移。与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等,又严重制约了步进电机的应用范围。步进电机的运行性能与它的驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。相对于其他的驱动,细分驱动不仅可以减小步进电机的步距角,分辨率,而且可以或低频振动,使电机运行更加平稳均匀。体来说,细分驱动的控制效果好。因为常用低端步进电机伺服没有编码器反馈,所以随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。所以在速度和精度要求不高的领域,其应用非常广泛。 因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以三相混合式步进电机比二相步进电机有更好应用前景。的三相混合式步进电机控制都是以硬件比较器完成,本文主要讲述使用DSP及空间矢量算法SVPWM来实现三相混合式步进电机控制。 2.细分原理 步进电机的细分控制从本质上讲是通过对步进电机的定子绕组中电流的控制,使步进电机内部的合成磁场按某种要求变化,从而实现步进电机步距角的细分。佳的细分是恒转矩等步距角的细分。一般情况下,合成磁场矢量的幅值决定了电机力矩的大小,相邻两合成磁场矢量的之间的夹角大小决定了步距角的大小。在电机内产生接近均匀的圆形磁场,各相绕组的合成磁场矢量,即各相绕组电流的合成矢量应在空间作幅值恒定的运动,这就需要在各相绕相中通以正弦电流。 三相混合式步进电机的工作原理十分类似于交流永磁同步伺服电机。其转子上所用永磁磁铁同样是具有高磁密特性的稀土永磁材料,所以在转子上产生的感应电流对转子磁场的影响可忽略不计。在结构上,它相当于一种多极对数的交流永磁同步电机。

KSDL64-20-P1 KSDL64-25-P1 KSDL64-35-P1 KSDL64-40-P1 KSDL64-50-P1 KSDL64-70-P1 KSDL64-100-P1 KSDL64-140-P1 KSDL64-200-P1 KSDL90-20-P1 KSDL90-25-P1 KSDL90-35-P1 KSDL90-40-P1 KSDL90-50-P1 KSDL90-70-P1 KSDL90-100-P1 KSDL90-140-P1 KSDL90-200-P1 KSDL110-20-P1 KSDL110-25-P1 KSDL110-35-P1 KSDL110-40-P1 KSDL110-50-P1 KSDL110-70-P1 KSDL110-100-P1 KSDL110-140-P1 KSDL110-200-P1 KSDL140-20-P1 KSDL140-25-P1 KSDL140-35-P1 KSDL140-40-P1 KSDL140-50-P1 KSDL140-70-P1 KSDL140-100-P1 KSDL140-140-P1 KSDL140-200-P1 KSDL200-20-P1 KSDL200-25-P1 KSDL200-35-P1 KSDL200-40-P1 KSDL200-50-P1 KSDL200-70-P1 KSDL200-100-P1 KSDL200-140-P1 KSDL200-200-P1 KSDL255-20-P1 KSDL255-25-P1 KSDL255-35-P1 KSDL255-40-P1 KSDL255-50-P1 KSDL255-70-P1 KSDL255-100-P1 KSDL255-140-P1 KSDL255-200-P1 KSEL120-90-P2

