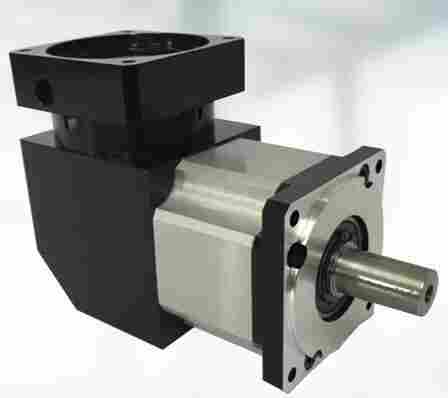
洛密行星減速PLX200-5-P1产品详情
洛密行星減速PLX200-5-P1由伊明传动(厦门)有限公司确认选型洛密行星減速PLX200-5-P1 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈. 行星减速机因为结构原因,单级减速小为3,大一般不过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不过3,但有部分大减速比定制减速机有4级减速. 相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免等特点. 因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来转速,扭矩,匹配惯量.那么我们在用的中要注意什么呢? 1.减速机额定输入转速高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不过2000nm,大扭矩行星减速机可做到10000nm以上.工作温度一般在-25℃到100℃左右,通过改变脂可改变其工作温度。

VRS100BCDE-3-K3-K5-19FB19 VRS100BCDE-4-K3-K5-19FB19 VRS100BCDE-5-K3-K5-19FB19 VRS100BCDE-6-K3-K5-19FB19 VRS100BCDE-7-K3-K5-19FB19 VRS100BCDE-8-K3-K5-19FB19 VRS100BCDE-10-K3-K5-19FB19 VRS100BCDE-15-K3-K5-19FB19 VRS100BCDE-16-K3-K5-19FB19 VRS100BCDE-20-K3-K5-19FB19 VRS100BCDE-25-K3-K5-19FB19 VRS100BCDE-28-K3-K5-19FB19 VRS100BCDE-30-K3-K5-19FB19 VRS100BCDE-35-K3-K5-19FB19 VRS100BCDE-40-K3-K5-19FB19 VRS100BCDE-50-K3-K5-19FB19 VRS100BCDE-30-K3-K5-19FB19 VRS100BCDE-35-K3-K5-19FB19 VRS100BCDE-40-K3-K5-19FB19 VRS100BCDE-50-K3-K5-19FB19 VRS100BCDE-60-K3-K5-19FB19 VRS100BCDE-70-K3-K5-19FB19 VRS100BCDE-80-K3-K5-19FB19 VRS100BCDE-100-K3-K5-19FB19 洛密行星減速PLX200-5-P1

伺服的发展趋势 数字化交流伺服的应用越来越广,用户对伺服驱动技术的要求越来越高。的来说,伺服的发展趋势可以概括为以下几个方面: 1.集成化 目前,伺服控制的输出器件越来越多地采用开关很高的功率半导体器件,这种器件将输入隔离、能耗制动、过温、过压、过流保护及故障诊断等功能全部集成于一个不大的模块之中。同一个控制单元,只要通过设置参数,就可以改变其性能,既可以使用电机本身配置的传感器构成半闭环调节,又可以外接外部传感器如位置、速度、力矩传感器等,构成高精度的全闭环调节。高度的集成化显著地缩小了整个控制的体积。 2. 智能化 目前伺服内部控制核心大都采用高速微处理器和数字处理机(DSP),从而实现完全数字化的伺服。伺服数字化是其实现智能化的前提条件。伺服的智能化在以下几个方面:的所有运行参数都可以通过人机对话的由来设置;其次它们都具有故障自诊断与分析功能;以及参数自整定的功能等。众所周知,闭环调节的参数整定是保证性能指标的重要环节,也是需要耗费较多时间与精力的工作。带有自整定功能的伺服单元可以通过几次试运行,自动将的参数整定出来,并自动实现其。 3. 网络化 伺服网络化是综合自动化技术发展的必然趋势,是控制技术、计算机技术和通信技术相结合的产物,现场总线是一种应用于生产现场,在现场设备之间、现场设备和控制装置之间实行双向、串形、多结点的数字通信技术。现场总线现已被广泛应用在伺服之间、伺服和其它设备如人机界面HMI、可编程控制器PLC等信息交互传输。现场总线有如下几个类型FF;ProfiBus、WorldFIP、ControlNet/DeviveNet、CAN 等。这些通讯协议都为多轴实时同步控制提供了可能性,也被一些高端伺服驱动器集成进去,从而使伺服达到了分布、开放、互联以及高可靠性。 3. 简易化 这里所说的“简”不是简单而是精简,是根据用户情况,将用户使用的伺服功能给与强化,使之专而精,而将不使用的一些功能给与精简,从而了伺服成本,为客户创造更多的收益,且通过精简一些元器件,了资源的浪费从而利于环保。这里所说的“易”是指,伺服的编程及操作是从用户角度出发设计,力求简单易行,使用户调试时只需简单。
PD200L1-4-35-114.3 PD200L1-5-35-114.3 PD200L1-6-35-114.3 PD200L1-7-35-114.3 PD200L1-8-35-114.3 PD200L1-10-35-114.3 PD200L2-16-35-114.3 PD200L2-20-35-114.3 PD200L2-25-35-114.3 PD200L2-28-35-114.3 PD200L2-35-35-114.3 PD200L2-40-35-114.3 PD200L2-50-35-114.3 PD200L2-60-35-114.3 PD200L2-70-35-114.3 PD200L2-80-35-114.3 PD200L2-100-35-114.3 PD200L1-4-38-180 PD200L1-5-38-180 PD200L1-6-38-180 PD200L1-7-38-180 PD200L1-8-38-180 PD200L1-10-38-180 PD200L2-16-38-180 PD200L2-20-38-180 PD200L2-25-38-180 PD200L2-28-38-180 PD200L2-35-38-180 PD200L2-40-38-180 PD200L2-50-38-180 PD200L2-60-38-180 PD200L2-70-38-180 PD200L2-80-38-180 PD200L2-100-38-180 洛密行星減速PLX200-5-P1

