86步進齒輪減速VRS100BCDE-5-K3-K5-19DB19产品选型
86步進齒輪減速VRS100BCDE-5-K3-K5-19DB19由伊明传动(厦门)有限公司辅助选型86步進齒輪減速VRS100BCDE-5-K3-K5-19DB19
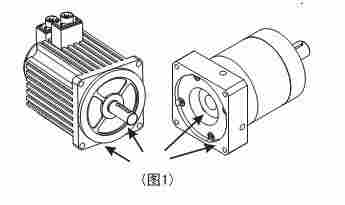
对于减速机外壳端面密封措施一般有以下几种: ①接合端面装配时涂成垫效果好的密封胶,且在密封胶固化前不得加入脂试运转; ②各接合端面相关零件的行为公差,保证止口的配合松紧度,严格去除零件的各部飞边毛刺; ③零件及接合面须清洗干净,晾干后装配,装配时采取保护措施,接合面不能造成二次污染; ④接合面部位的紧固件必须达到设计的拧紧力矩,且圆周紧固符合规范; ⑤加大或加密紧固件的圆周布置,端面之间的预应力; ⑥端面之间相互受扭力较大的接合面布置圆柱销或弹性销,防止接合端面之间的密封在相互作用的反扭矩下产生微小的,而使端面密封失效; ⑦在端面接合部位的止口上o 形圈实现径向密封。 ⑧在端面接合部位的端面上o形圈实现端面密封。

VRS075BCDE-3-K3-K5-19FB19 VRS075BCDE-4-K3-K5-19FB19 VRS075BCDE-5-K3-K5-19FB19 VRS075BCDE-6-K3-K5-19FB19 VRS075BCDE-7-K3-K5-19FB19 VRS075BCDE-8-K3-K5-19FB19 VRS075BCDE-10-K3-K5-19FB19 VRS075BCDE-15-K3-K5-19FB19 VRS075BCDE-16-K3-K5-19FB19 VRS075BCDE-20-K3-K5-19FB19 VRS075BCDE-25-K3-K5-19FB19 VRS075BCDE-28-K3-K5-19FB19 VRS075BCDE-30-K3-K5-19FB19 VRS075BCDE-35-K3-K5-19FB19 VRS075BCDE-40-K3-K5-19FB19 VRS075BCDE-50-K3-K5-19FB19 VRS075BCDE-30-K3-K5-19FB19 VRS075BCDE-35-K3-K5-19FB19 VRS075BCDE-40-K3-K5-19FB19 VRS075BCDE-50-K3-K5-19FB19 VRS075BCDE-60-K3-K5-19FB19 VRS075BCDE-70-K3-K5-19FB19 VRS075BCDE-80-K3-K5-19FB19 VRS075BCDE-100-K3-K5-19FB19
步进电动机已成为除直流电动机和交流电动机以外的第三类电动机。电动机作为机电能量转换装置,在人类的生产和生活进入电气化中起着关键的作用。可是在人类社会进入自动化时代的,电动机的功能已不能工厂自动化和办公自动化等各种运动控制的要求。为适应这些要求,发展了一系列新的具备控制功能的电动机,其中较有自己特点,且应用十分广泛的一类便是步进电动机。 步进电动机的发展与计算机工业密切相关。自从步进电动机在计算机设备中取代小型直流电动机以后,使其设备的性能,很快地促进了步进电动机的发展。另一方面,微型计算机和数字控制技术的发展,又将作为数控执行部件的步进电动机推广应用到其他领域,如电加工机床、小功率机械加工机床、测量仪器、光学和仪器以及包装机械等。 任何一种产品成熟的,基本上都是规格品种逐步统一和简化的。现在,步进电动机的发展已归结为单段式结构的磁阻式、混合式和爪极结构的永磁式三类。爪极电机价格便宜,性能指标不高,混合式和磁阻式主要作为高分辨率电动机,由于混合式步进电动机具有控制功率小,运行平稳性而逐步处于主导地位。典型的产品是二相8极50齿的电动机,步距角1.8°/0.9°(全步/半步); 还有五相10极50齿和一些转子100齿的二相和五相步进电动机,五相电动机主要用于运行性能较高的。到目前,工业发达的磁阻式步进电动机已极少见。 步进电动机大的生产国是,如伺服公司、东方公司、SANYO DENKI和MINEBEA及NPM公司等,特别是东方公司,无论是电动机性能和外观,还是生产手段,都堪称是上好的。现在步进电动机年产量(含国外独资公司)近2亿台。 另外的结论是HB型电动机更适合于低速大转矩用途;RM型适用于平稳运行以及转速大于1000r/min的用途;而PM型成本低,在低转速时的振动和高转速时的大转矩方面,三相PM型电动机比两相电动机的性能要好。 因此,当前有发展前景的当属混合式步进电机,而混合式电动机又向以下四个方向发展: 发展趋势,是继续沿着小型化的方向发展。随着电动机本身应用领域的拓宽以及各类整机的不断小型化,要求与之配套的电动机也必须越来越小,在57、42机座号的电动机应用了多年后,现在其机座号向39、35、30、25方向向下延伸。瑞士ESCAP公司近还研制出外径仅10mm的步进电动机。 发展趋势之二,是改圆形电动机为方形电动机。由于电动机采用方型结构,使得转子有可能设计得比圆形大,因而其力矩体积比将大为。同样机座号的电动机,方形的力矩比圆形的将30%~40%。 发展趋势之三,对电动机进行综合设计。即把转子位置传感器,减速齿轮等和电动机本体综合设计在一起,这样使其能方便地组成一个闭环,因而具有更加优越的控制性能。 发展趋势之四,向五相和三相电动机方向发展。目前广泛应用的二相和四相电动机,其振动和噪声较大,而五相和三相电动机具有优势性。而就这两种电动机而言,五相电动机的驱动电路比三相电动机精密且复杂,因此三相电动机的价格比要比五相电动机更低一些。
VRS100BCDE-3-K3-K5-19DD19 VRS100BCDE-4-K3-K5-19DD19 VRS100BCDE-5-K3-K5-19DD19 VRS100BCDE-6-K3-K5-19DD19 VRS100BCDE-7-K3-K5-19DD19 VRS100BCDE-8-K3-K5-19DD19 VRS100BCDE-10-K3-K5-19DD19 VRS100BCDE-15-K3-K5-19DD19 VRS100BCDE-16-K3-K5-19DD19 VRS100BCDE-20-K3-K5-19DD19 VRS100BCDE-25-K3-K5-19DD19 VRS100BCDE-28-K3-K5-19DD19 VRS100BCDE-30-K3-K5-19DD19 VRS100BCDE-35-K3-K5-19DD19 VRS100BCDE-40-K3-K5-19DD19 VRS100BCDE-50-K3-K5-19DD19 VRS100BCDE-30-K3-K5-19DD19 VRS100BCDE-35-K3-K5-19DD19 VRS100BCDE-40-K3-K5-19DD19 VRS100BCDE-50-K3-K5-19DD19 VRS100BCDE-60-K3-K5-19DD19 VRS100BCDE-70-K3-K5-19DD19 VRS100BCDE-80-K3-K5-19DD19 VRS100BCDE-100-K3-K5-19DD19 86步進齒輪減速VRS100BCDE-5-K3-K5-19DB19

