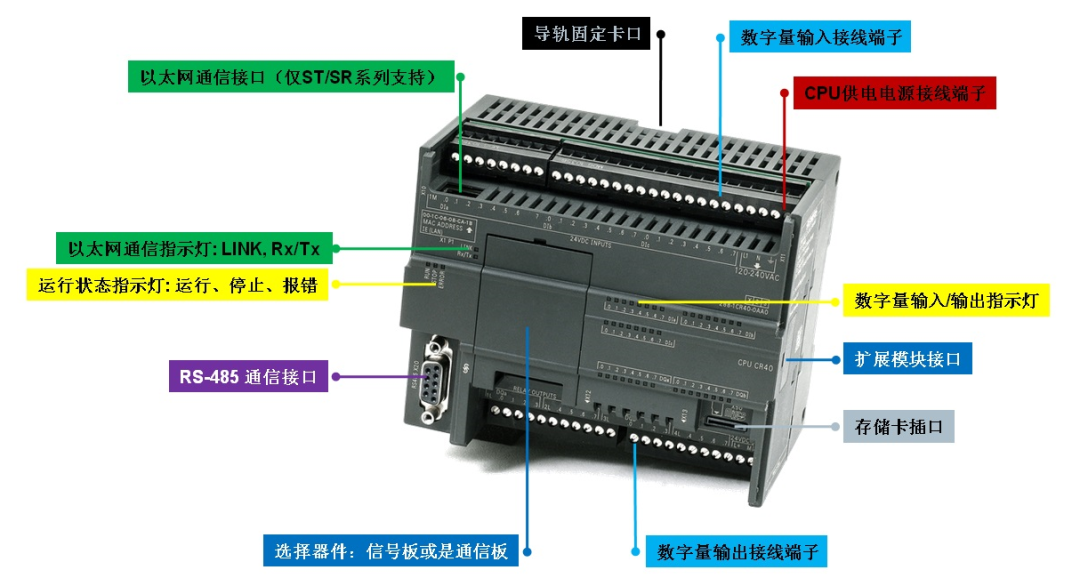
一、S7-200 SMART CPU性能

二、S7-200 SMART I/O扩展
(1)S7-200 SMART信号板
S7-200 SMART共提供了5种不同的信号板。使用信号板,可以在不额外占用电控柜空间的前提下,提供额外的数字量I/O、模拟量I/O和通信接口,达到化配置。

(2)S7-200 SMART SM模块
S7-200 SMART提供20种不同扩展模块,方便扩展本地的数字量和模拟量I/O及通信端口。
(3)S7-200 SMART 扩展能力

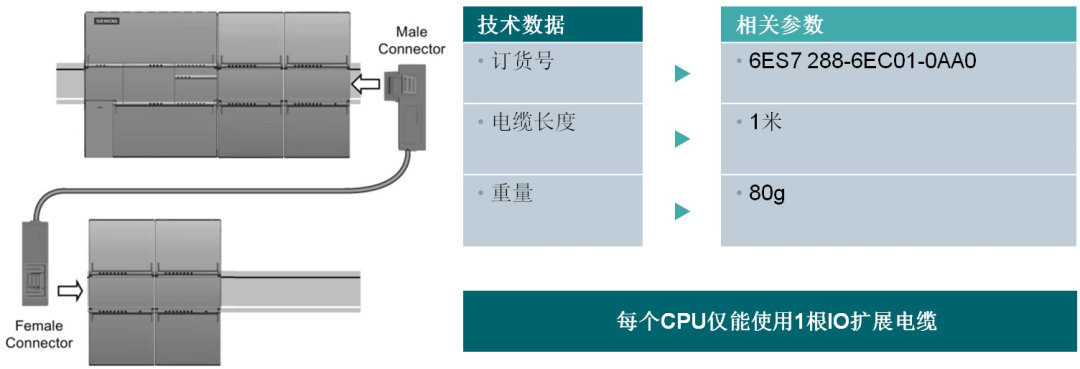
(4)S7-200 SMART I/O扩展电缆
三、S7-200 SMART配套电源
四、S7-200 SMART通讯能力
(1)S7-200 SMART通讯能力
(2)S7-200 SMART网络通讯

五、S7-200 SMART运动控制能力
(1)开环运动控制
S7-200 SMART CPU 通过本体的晶体管输出点,实现运动轴(Axis of Motion)控制:内置于 CPU,用于速度和位置控制。S7-200 SMART CPU 提供了三种开环运动控制方法:运动控制向导,PTO(脉冲串输出)及PWM(脉宽调制)。如下表 1 所示:
|
开环运动控制方法 |
CPU 版本 |
| V1.0/V2.0 |
V2.1以上 |
|
运动控制向导 |
运动控制向导 |
运动控制向导 |
| PTO |
-- |
PLS 指令编程 |
|
PWM |
PWM向导 |
PLS 指令编程/PWM向导 |
表 1. S7-200 SMART 开环运动控制方法
注意:高速脉冲输出操作只能在晶体管输出的 CPU 上进行,不可以在继电器输出的 CPU 上进行。如果已通过运动控制向导将所选输出点组态为运动控制用途,则无法通过 PLS 指令激活PTO/PWM。(2)通过PROFINET连接V90实现基本定位控制从STEP 7-Micro/WIN SMART V2.4 和 S7-200 SMART PLC固件版本 V2.4开始增加了 PROFINET通信的功能,通过PROFINET接口可与V90 PN伺服驱动器进行通信连接进行位置控制,此接口可支持八个连接(IO 设备或驱动器)。
")
")
")
(3)直线插补功能
STEP 7?Micro/WIN SMART V2.7和S7-200 SMART V2.7 CPU固件支持对2D/3D直线插补运动进行基于PTO的开环运动控制。使用运动向导组态轴组和生成POU,命令轴组从实际位置到*或相对目标位置的2D/3D直线插补运动。使用运动向导组态轴组和生成POU,以命令轴组按照多线段组态中的路径运动。
")
