西门子CPU6ES74122XJ050AB0 西门子CPU6ES74122XJ050AB0
无可用图片 | SIMATIC S7-400,CPU 412-2 中央处理单元,带: 512 KB 工作内存, (256 KB代码,256 KB数据), 1个接口 MPI/DP 12 MBIT/S, ,2个接口 PROFIBUS DP |
我公司西门子销售 PLC CPU 变频器 楼宇
(西门子代理商)
SIEMENS上海朕锌电气设备有限公司
销售电话 (同步)联系人万女士
QQ 2779823058 转真
电话 zx-plc.com
微信 W
本公司代理系列如下
CPU PLC模块(西门子代理)销售西门子S7/200/300/400/1200/1500PLC/变频器/人机界面/触摸屏/西门子通讯电缆/现场总线、
西门子电缆 拖缆 网线 DP接头
【一诺千金诚信交易】【长期销售、安全稳定】
【称心满意、服务动力】【真诚面对、沟通无限】
【质量、客户满意】
西门子 知其巧 用其妙
真诚对待您的每一次来电
西门子CPU6ES74122XJ050AB0


使用ApDiag工具进行WinCC脚本诊断概述
WinCC 的C脚本功能非常强大,可以提供较高的自由度。 但是,不恰当地组态和使用脚本功能会显著降低系统性能,也可能导致系统崩溃。本文所讨论的脚本问题主要为C脚本的阻塞和挂起问题,即如果在过小的周期内正在运行的动作太多或者动作的执行时间过长(要处理的动作将越聚越多),或者动作已被挂起(休眠、循环、输出对话框、等待另一个应用程序的响应...),则等待队列可能会溢出。所有其它动作均将积聚在等待队列中,不能及时进行处理。
针对以上问题,可以使用 ApDiag 诊断工具进行分析和诊断,ApDiag 工具主要可以提供以下功能:
1. 监控当前请求队列中待处理的动作数。
2. 判断脚本是否发生阻塞。
3. 帮助定位发生阻塞的动作。
4. 定位导致脚本阻塞的函数。
5. 启动将重要脚本诊断值保存在变量中的功能。
6. 设置诊断信息输出到窗口、文件或被删除。
……
2 ApDiag 诊断工具提供的主要功能和使用方法介绍
以下介绍了6个主要的功能和相应的使用方法。注意,要及时关闭不用的诊断功能,以避免在运行系统运行期间降低系统性能。
2.1监控当前请求队列中待处理的动作数
功能描述:根据当前请求队列中待处理动作数的变化趋势,判断脚本是否发生阻塞。
使用方法:
首先,在画面上放置“GSC 诊断窗口”,运行WinCC时,打开ApDiag 工具,选择“Info”菜单下的“Count of Actions in RequestQueue”菜单项,将输出当前请求队列中待处理的动作数,其中包括来自全局脚本的作业、来自画面的周期性作业以及来自画面的事件控制性作业。例如,在“GSC 诊断窗口”中输出如下图1所示的内容,红色框中的内容代表来自全局脚本作业的当前请求队列中待处理的动作数为8个。
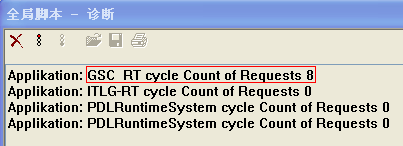
图 1 使用“Count of Actions in RequestQueue”的诊断输出
运行一段时间后,再次点击“Count of Actions in RequestQueue”菜单项,红色框所示的待处理的动作数变为59个,如图2所示。多次操作后,如果待处理的动作数有不断上涨的趋势,则说明全局脚本发生了阻塞。
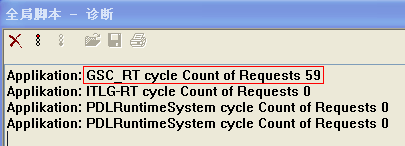
图 2再次使用“Count of Actions in RequestQueue”的诊断输出
此外,在“Info”菜单中,还提供了与系统有关的其它诊断信息,如图3所示。在选择相应菜单项后,均将输出诊断信息到“GSC 诊断窗口”,详细内容请参见帮助文档。
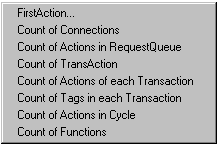
图 3 “Info”菜单中菜单项
2.2判断脚本是否发生阻塞
功能描述:设置“扫描速率”和“梯度”,可以监视请求队列的增长。
使用方法:
打开“Diagnostics”菜单下的“概要文件”(Profile) 菜单项。组态“Check the Request/ActionQueues”,可对缓慢增加的等待队列进行检测。“扫描速率” (ScanRate) 值可用于定义应在增加了个新作业后检查队列的长度。 如果队列的增长出在“梯度”(Gradient) 中所定义的值,则将以 “printf ”的形式输出警告。
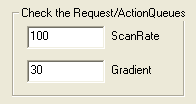
图 4 “扫描速率”和“梯度” 的组态
如上图4所示,如果输入“扫描速率”(ScanRate) 为“100”且“梯度”(Gradient) 为“30”,则每放置 100 个新条目(动作)到队列中,即会检查队列的增长是否过 30 个条目(100 个新作业中得到处理的少于 70 个)。 如果情况如此,则以 “printf() ”的形式输出以下诊断信息,如图5所示。

图 5 组态“扫描速率”和“梯度”输出的诊断信息
需要注意的是,除了全局动作之外,画面中周期执行的脚本也在检查的范围内。
2.3帮助定位发生阻塞的动作
功能描述:设置动作运行时间的限值,可测量运行时间过长的动作的实际运行时间,帮助定位发生阻塞的动作。
使用方法:
打开“Diagnostics”菜单下的“概要文件”(Profile) 菜单项。激活“检查运行需要过 xx 毫秒的动作”(Check which Action need more than xx msec) 复选框,则将输出运行时间大于规定时间的所有动作的实际运行时间。
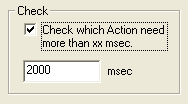
图 6 组态“Check which Action need more than xx msec”
如上图6所示,将xx毫秒设置成2000毫秒,如果有动作执行出2000毫秒,可以在图7的“GSC诊断窗口”中找到如下的输出:
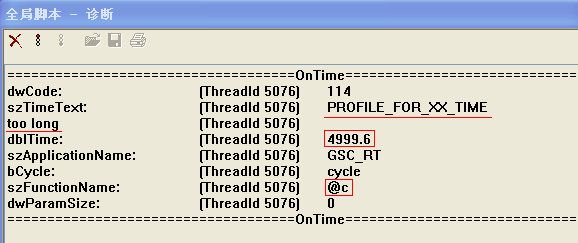
图 7 组态“检查运行需要过 xx 毫秒的动作”的输出诊断信息
从上图中红色线标注的信息可以看出,有动作执行出设定的毫秒数。由“szFunctionName:@c”,在“GSC 运行系统窗口”可以查到“@c” 所对应的动作名称。假设该动作设置的触发周期为2秒钟,但是由上图实际执行时间为4999.6毫秒,则有可能由于该动作执行时间过长,导致整个脚本队列的堵塞,需要检查该动作的代码。注意,如果该动作发生挂起(停在某代码处,无法继续执行),则无法计算该动作执行的时间,此时没有以上的输出。
2.4定位导致脚本阻塞的函数
功能描述:使用正在运行动作的“调用堆栈”信息,定位导致脚本阻塞的函数。
使用方法:
使用“Info”菜单下的菜单命令“个动作”(FirstAction) ,可以得到正在运行的动作的相关信息。该命令可以将当前正在运行的动作(如果脚本发生阻塞时,很有可能为正在发生阻塞的动作,该动作阻塞了其它需要处理的动作),以及动作的调用堆栈信息输出到文本文件中。如果正在执行的动作很多,这将有助于快速定位到发生阻塞的动作,并从“调用堆栈”信息中查出该动作中究竟是哪个函数发生了阻塞或挂起。
西门子6ES7541-1AD00-0AB0图 8使用“FirstAction”输出的正在运行动作的信息
上图8是使用“FirstAction”输出的正在运行动作的信息和调用堆栈信息的示例。首先介绍一下什么叫调用堆栈:假设有几个函数,分别是function1、function2和function3,且function1调用function2,function2调用function3。在function3运行过程中,可以从线程当前堆栈中了解到调用它的那几个函数的名称。从函数的调用顺序关系看,function3、function2、function1呈现出一种“堆栈”的特征,后被调用的函数出现在上方,因此称呼这种关系为调用堆栈(Call Stack)。
由上图所示的“szApplicationName:GSC_RT”判断输出的是某一全局动作的信息;由“szFunctionName:@1d5”,在“GSC 运行系统窗口”中可以查到“@1d5” 所对应的全局动作的名称;再仔细核对该全局动作的代码,从上述调用堆栈函数列表中就可以查找到该全局动作代码中使用的函数MSRTGetMsgQuit(这是一个ODK函数),可能由于该函数执行所需的时间较长,或者发生了阻塞或挂起,因此使用“FirstAction”功能时,打印到该函数调用堆栈信息的概率就比较大。
S120驱动模块 6SL3120-1TE24-5AB0 SINAMICS 单轴45A驱动模块
S120驱动模块 6SL3120-1TE23-0AA0 SINAMICS 单轴30A驱动模块
S120驱动模块 6SL3120-1TE23-0AA1 SINAMICS 单轴30A驱动模块
S120驱动模块 6SL3120-1TE23-0AA3 SINAMICS 单轴30A驱动模块
S120驱动模块 6SL3120-1TE23-0AB0 SINAMICS 单轴30A驱动模块
S120驱动模块 6SL3120-1TE21-8AA0 SINAMICS 单轴18A驱动模块
S120驱动模块 6SL3120-1TE21-8AA1 SINAMICS 单轴18A驱动模块
S120驱动模块 6SL3120-1TE21-8AA3 SINAMICS 单轴18A驱动模块
S120驱动模块 6SL3120-1TE21-8AA4 SINAMICS 单轴18A驱动模块
S120驱动模块 6SL3120-1TE21-8AB0 SINAMICS 单轴18A驱动模块
S120驱动模块 6SL3120-1TE21-0AA0 SINAMICS 单轴9A驱动模块
S120驱动模块 6SL3120-1TE21-0AA1 SINAMICS 单轴9A驱动模块
S120驱动模块 6SL3120-1TE21-0AA3 SINAMICS 单轴9A驱动模块
S120驱动模块 6SL3120-1TE21-0AA4 SINAMICS 单轴9A驱动模块
S120驱动模块 6SL3120-1TE21-0AB0 SINAMICS 单轴9A驱动模块
S120驱动模块 6SL3120-1TE15-0AA0 SINAMICS 单轴5A驱动模块
S120驱动模块 6SL3120-1TE15-0AA3 SINAMICS 单轴5A驱动模块
S120驱动模块 6SL3120-1TE15-0AA4 SINAMICS 单轴5A驱动模块
S120驱动模块 6SL3120-1TE15-0AB0 SINAMICS 单轴5A驱动模块
S120驱动模块 6SL3120-1TE13-0AA0 SINAMICS 单轴3A驱动模块
S120驱动模块 6SL3120-1TE13-0AA3 SINAMICS 单轴3A驱动模块
S120驱动模块 6SL3120-1TE13-0AA4 SINAMICS 单轴3A驱动模块
S120驱动模块 6SL3120-1TE13-0AB0 SINAMICS 单轴3A驱动模块
S120驱动模块 6SL3120-2TE21-8AA0 SINAMICS 双轴18A驱动模块
S120驱动模块 6SL3120-2TE21-8AA3 SINAMICS 双轴18A驱动模块
S120驱动模块 6SL3120-2TE21-8AB0 SINAMICS 双轴18A驱动模块
S120驱动模块 6SL3120-2TE21-0AA0 SINAMICS 双轴9A驱动模块
S120驱动模块 6SL3120-2TE21-0AA3 SINAMICS 双轴9A驱动模块
S120驱动模块 6SL3120-2TE21-0AA4 SINAMICS 双轴9A驱动模块
S120驱动模块 6SL3120-2TE21-0AB0 SINAMICS 双轴9A驱动模块
S120驱动模块 6SL3120-2TE15-0AA0 SINAMICS 双轴5A驱动模块
西门子CPU6ES74122XJ050AB0
