西门子6ES7 422-7BL00-0AB0
来源:上海西邑电气技术有限公司
发布时间:2018-04-17 10:15:29
l 西门子上海朕锌电气设备有限公司欢迎大家前来咨询:
l line;"> :张先生
l 移动手机:line;">
l 公司:line;">
l 企业line;">Q Q:line;">1287379777
T-CPU使用IM174接口模板寻找参考点功能简介
1 IM174接口模板
在 SIMATIC 和 SIMOTION 自动化环境中,某些应用场合需要模拟电机和步进电机的控制功能。此外,对于只有模拟接口的旧驱动器或非西门子驱动器,需要使用IM 174 接口模块来连接。
IM 174 是一个接口模块,多可以操作四个带有模拟量设定值或者四个步进驱动器的接口,每个轴可以带有一个 TTL 或 SSI 信号的编码器反馈。也可以使用不带编码器的四个步进驱动器,以及模拟驱动器和步进驱动器的组合(混合操作)。
控制器与 IM 174 之间的通信通过特定的PROFIBUS消息帧类型来进行,该消息帧类型除了包含数字量输入/输出数据之外,还包含符合PROFIDrive 行规、每个驱动器特定的消息帧类型(标准消息帧 3 和 81)。作为循环 DP通信的一部分,驱动器的实际值(编码器值)通过等时同步 PROFIBUS 从 IM 174 模块传送至控制器,而由控制器计算出的速度设定值传送至 IM 174 模块。随后,传送的速度设定值作为模拟值或脉冲从 IM 174 模块输出到驱动器。
IM 174 可用于以下控制任务:
与 T-CPU/SIMOTION CPU/S7 300 CPU 通过等时同步 PROFIBUS 配合使用
控制模拟驱动器
控制步进电机
读入编码器数据。
本文主要介绍 IM174 接口模块与T-CPU 配合使用时回参考点的用法及注意事项。
2 T-CPU 使用 IM174 接口模板寻找参考点
在 S7-Technology 配置工具中插入轴之后,每个定位轴工艺对象下面都会有Homing 配置界面(图1),在这个界面里面可以做寻找参考点相关的参数设置,具体参数可以参考S7-Technology 使用手册,本文主要介绍 IM174 相关的设置。在主动寻找参考点的配置页面下,有几种寻零模式可以选择。(S7-technology手册下载链接:30119663 )
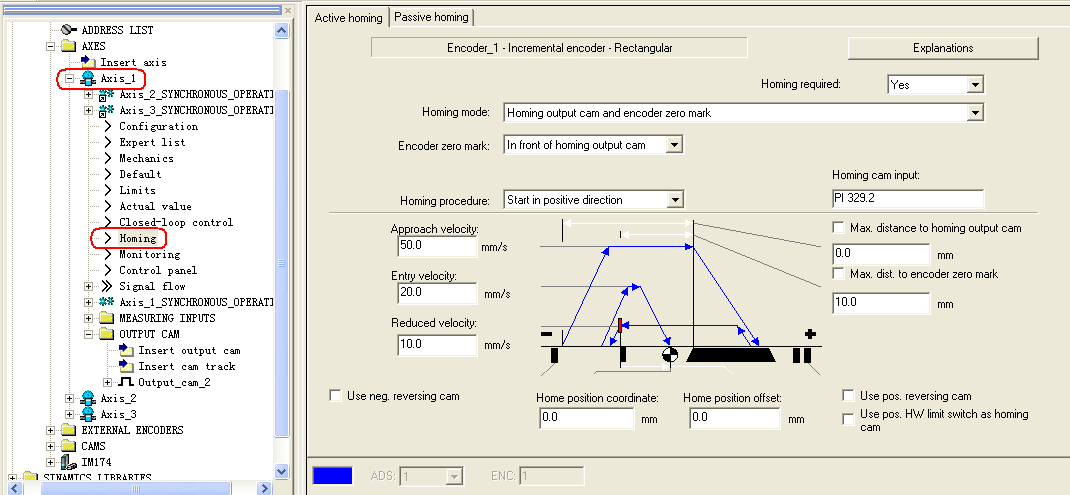
图 1. Homing
2.1 外部参考点加编码器零脉冲(Homing output cam and encoder zero mark)
当驱动器使用增量编码器作为位置反馈时,通常选用外部参考点加编码器零脉冲的回参考点方式,该模式需要使用增量编码器的零脉冲和额外的一个外部参考点来完成回零操作。在配置界面中外部参考点使用的数字量输入地址(图 2),这个数字量输入可以使用 T-CPU DP Drive 接口上的分布式 I/O 也可以使用 IM174 集成的数字量输入,IM174 的数字量输入地址在STEP7的硬件组态中已经进行了自动分配(图 3),具体地址的定义可以参考IM174接口模块的使用手册(图 4)(IM174模块手册下载链接:35014863 )
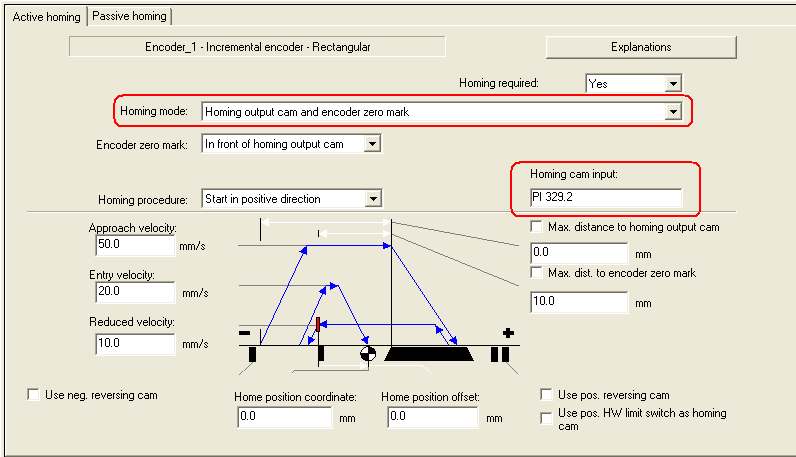
图2.外部参考点加编码器零脉冲
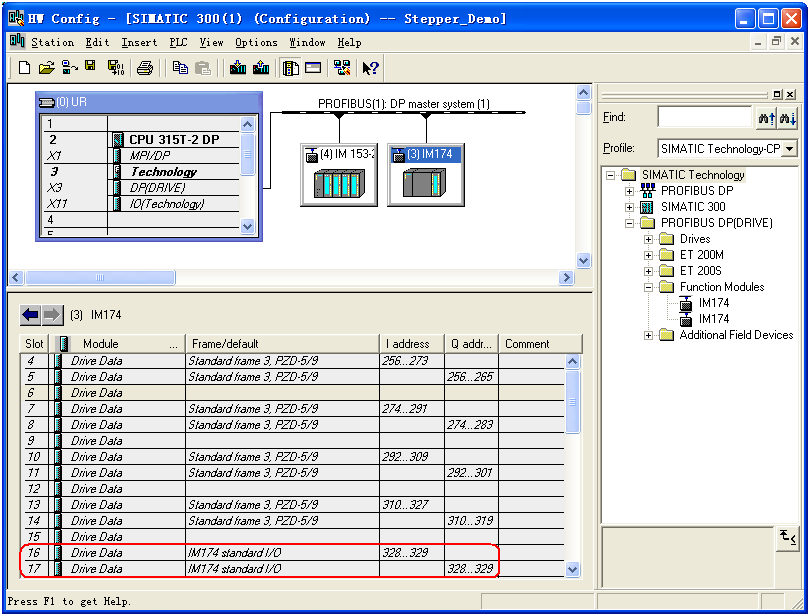
图 3. IM174 硬件地址
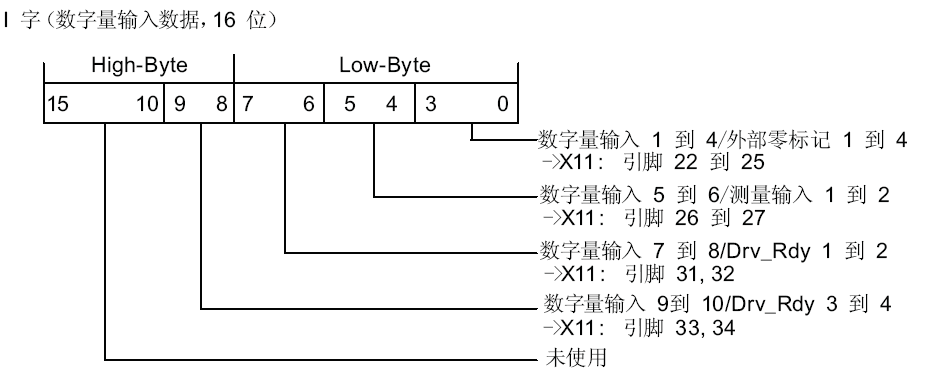
图 4. IM174 输入地址分配
本例中参考点接近开关用的是IM174模块上的外部零标记3,所以地址为 PI329.2,配置完成后,可以在程序中调用FB 403 MC_Home 功能块执行寻参考点操作。
2.2 仅使用外部零标记(External zero mark only)
在很多情况下,使用IM174的时候是通过脉冲连接第三方伺服驱动器或者步进电机,这时候不需要使用编码器来做位置闭环,所以就没有编码器零脉冲来辅助回参考点,这时候可以在配置界面选择仅使用外部零脉冲模式(图 5)
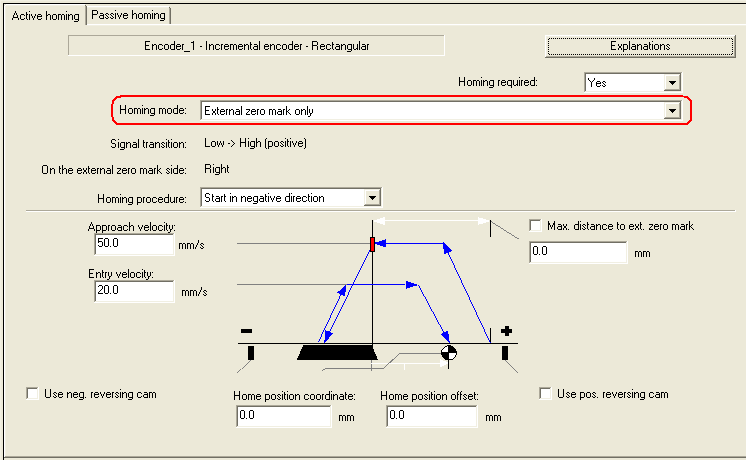
图 5. 仅使用外部零标记
2.2.1 启用IM174 的 611U 兼容模式
选择这种模式后,可以看到在配置界面没有可填写的外部零脉冲输入地址,所以这时候只能使用IM174接口模块上的集成外部零标记输入点B1..B4,具体接线端子请参考IM174 模块使用手册。具体配置过程:
在STEP7硬件组态里面激活IM174 接口模块的611U 兼容模式(图 6)
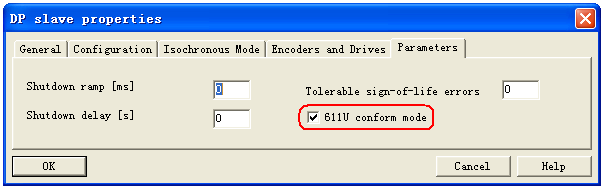
图6.IM174 的611U 兼容模式
2.2.2 建立凸轮输出
根据 IM174 模板手册中的描述,如果选择B1..B4 作为工艺对象的外部零标记,必须置位输出字里面相应的位,如图 7
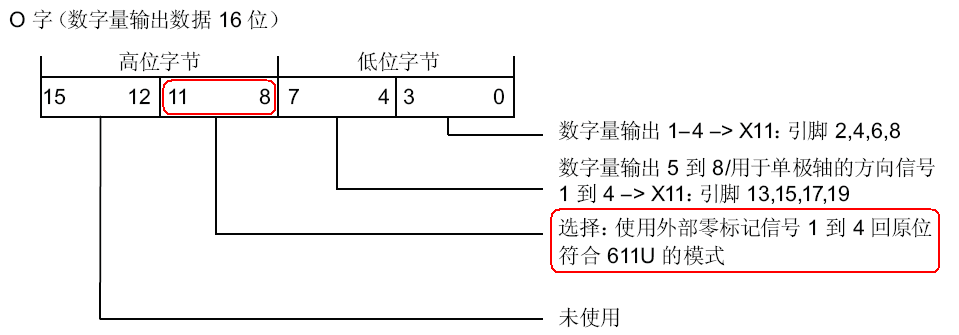
图7. IM174 输出地址分配
由于IM174的I/O硬件地址已经分配为328..329(图3),这些地址在CPU里面没有办法直接置位,所以需要通过建立一个凸轮输出(Cam Output)来置位相应的位(图8),在凸轮的输出配置界面里,将凸轮的输出地址选为IM174输出地址里面要置位的地址,本例中使用B3,所以需要置位的地址是PQ328.2
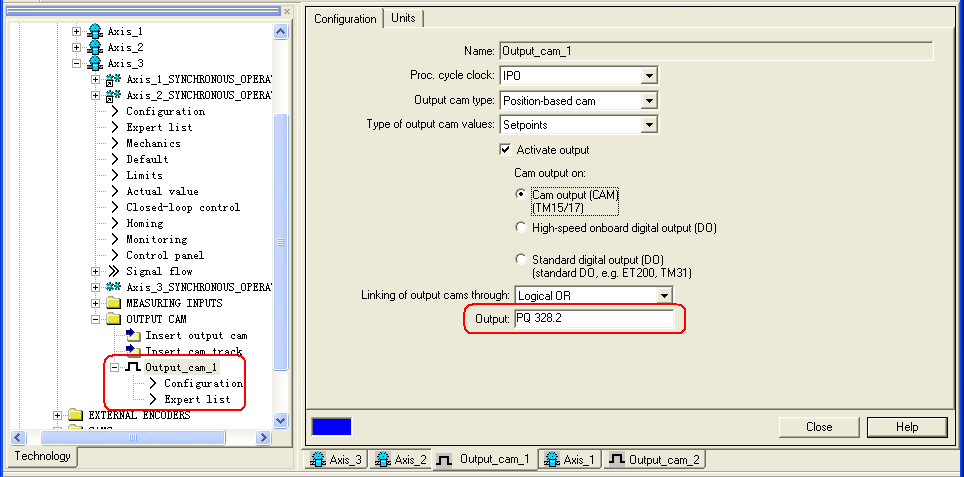
图8. 组态凸轮输出
2.2.3 程序执行
做好相应配置后需要到主程序中调用凸轮输出和回参考点的功能块,需要注意的是,FB430 MC_CamSwitch 中的模式要选择4,这样能够保证一旦使能该功能块,PQ328.2就会被立即置位(图9),关于FB430功能块的具体使用请参考STEP7在线帮助或者S7-Technology 使用手册。
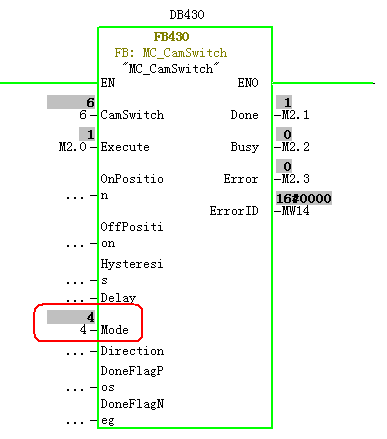
图9. FB430 MC_CamSwitch
正确执行完FB430之后,就可以调用FB 403 MC_Home 进行寻找参考点操作了。
2.3 仅使用编码器零脉冲(Encoder zero mark only)
在某些旋转运动的被控对象时候,只需要编码器零脉冲就可以确定参考点,这时可以选择仅使用编码器零脉冲的寻找参考点模式,配置如图10,保存之后就可以在主程序调用FB403 来启动回原点操作了。
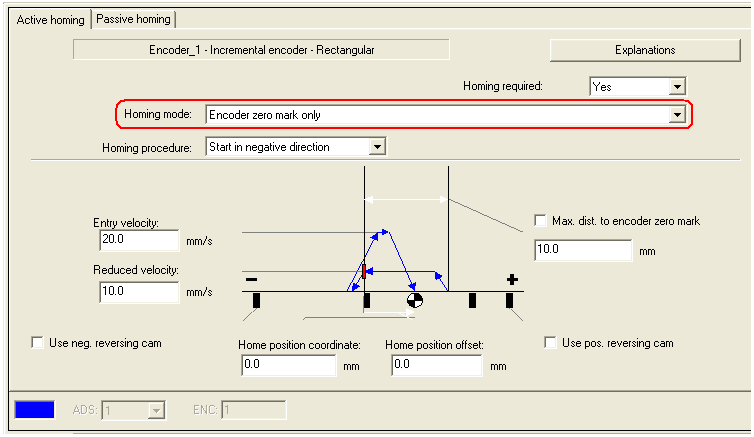
图10. 仅使用编码器零脉冲
关键词:西门子6ES7 422-7BL00-0AB0
温馨提示:为规避购买风险,建议您在购买产品前务必确认供应商资质及产品质量。
