西门子6EP1334-2BA01性能及参数
西门子6EP1334-2BA01性能及参数
西门子6EP1334-2BA01性能及参数
SIEMENS西门子上海朕锌电气设备有限公司
联系人:田敏 (田工)
24小时销售及维修热线:
电 话: 传 真:
手 机: Q Q : 1944287917
微信(手机同步)
邮箱:1944287917@qq.com
西门子系列回收
地址:上海市金山区枫湾路500号
西门子博大精深
上海朕锌西门子一级代理商
公司主营:西门子数控系统,S7-200PLC S7-300PLC S7-400PLC S7-1200PLC 6ES5 ET200 人机界面,变频器,DP总线,MM420 变频器MM430 变频器MM440 6SE70交流工程调速变频器6RA70直流调速装置 SITOP电源,电线电缆,数控备件,伺服电机等工控产品。电话: 手机: 商务QQ:1944287917
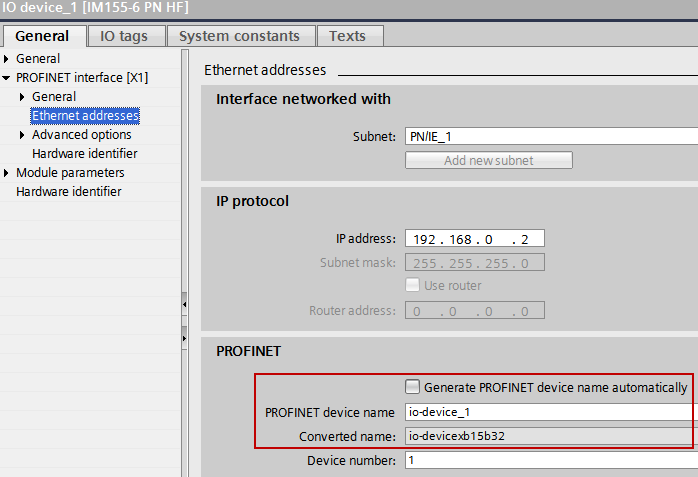
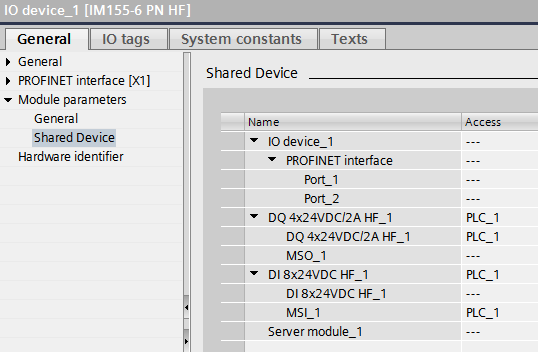
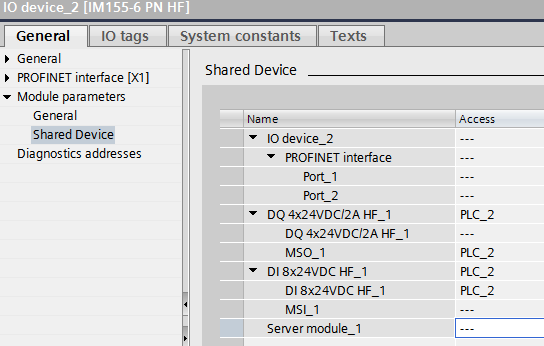
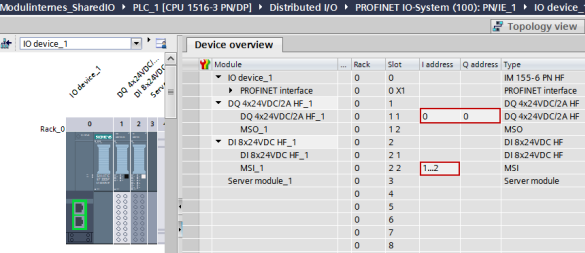
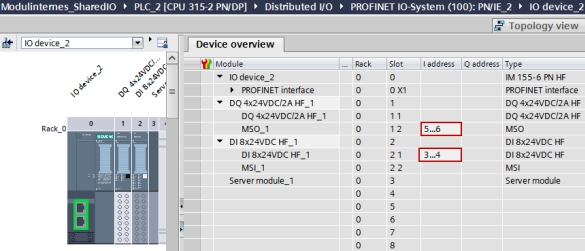
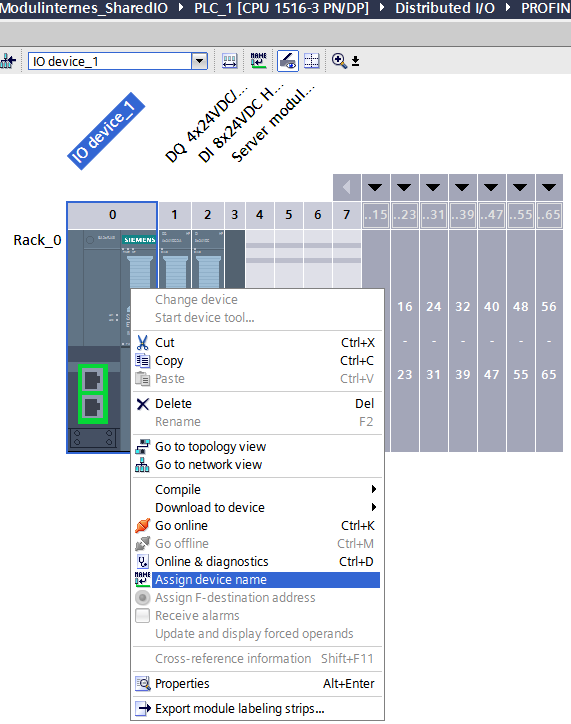
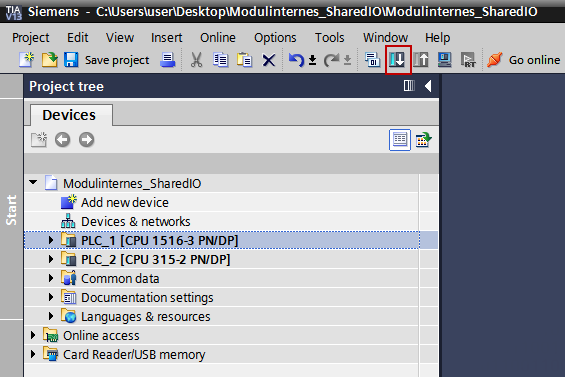
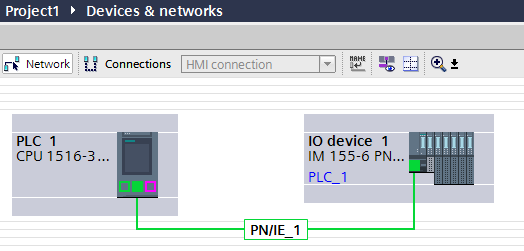
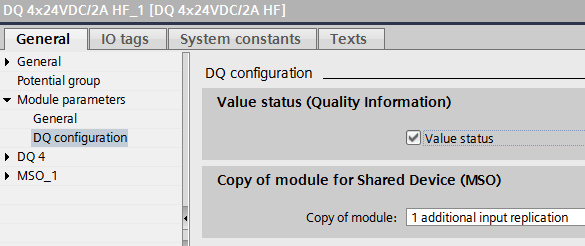
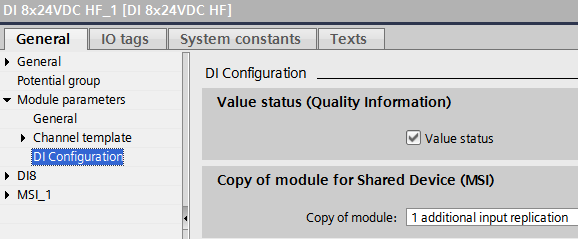
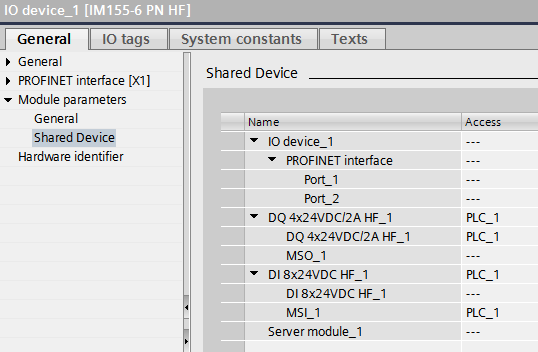
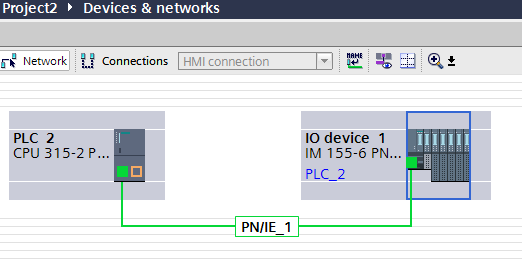
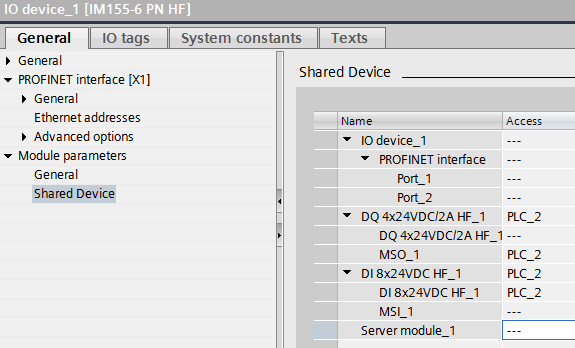
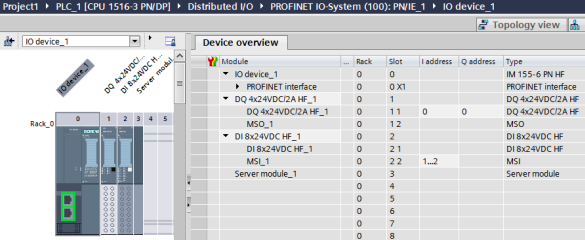
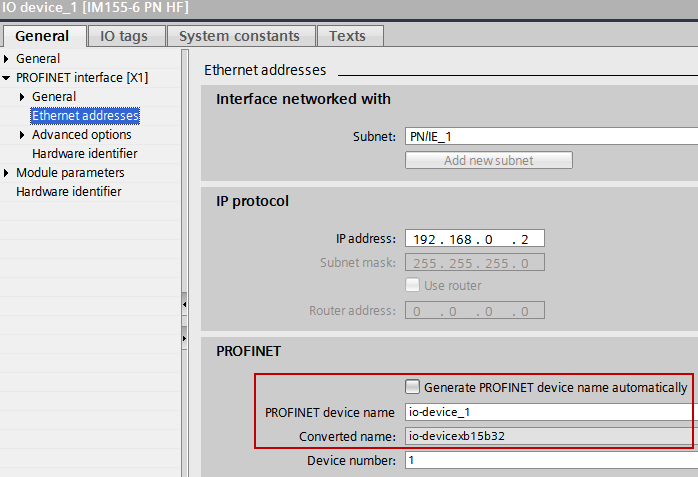
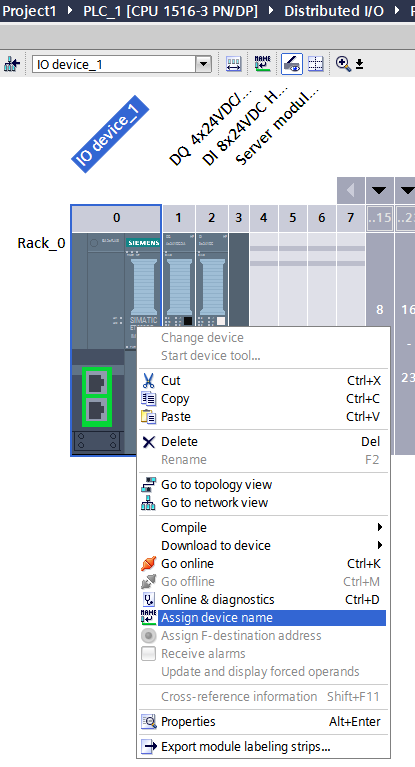
如何在STEP 7 (TIA Portal)中配置访问共享的设备及模块内部共享输入/输出(MSI/MSO)功能?
文档: 西门子工程师本文档!
通过模块内部共享输入/输出(MSI/MSO)功能,输入或输出模块可以将其输入或输出数据多提供给4个IO控制器。
为了防止工厂、系统、机器和网络受到网络攻击,需要实施并持续保有全面、的工业信息安全概念。西门子的产品和解决方案只是此概念的其中一个要素。更多有关工业信息安全的信息,请访问


如何使用两个OLM建立冗余的光纤环网,LED将如何显示?
新手必读: 西门子工程师本文档!
说明:
对于多OLM可参考手册:条目号8331164
对于多OLM可参考FAQ:条目号19758281
建立带有两个PROFIBUS OLM的冗余光纤环网是冗余光纤环网的一种特殊情形,可以通过下列两个组态来实现。
组态 1:
_opt_redundater_ring_2_olms_t1_01_e.gif)
图 1: 冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH3, OLM2/CH2 => LWL2 => OLM1/CH3
组态 2:
_opt_redundater_ring_2_olms_t1_02_e.gif)
图 2:冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH2, OLM2/CH3 => LWL2 => OLM1/CH3
关于如何建立冗余光纤环网的提示:
-
只能用OLM /P12 /G12 /G12-1300和G12 EEC或OLM /P4 /S4 /S4-1300建立冗余光纤环网,这些是有两个光信道的OLM。
-
只有同一类型的OLM或者下列组合才能连接在一起:
- OLM/P12和OLM/P12
- OLM/G12和OLM/G12和OLM/G12 EEC
- OLM/G12-1300和OLM/G12-1300
- OLM/P4和OLM/P4
- OLM/S4和OLM/S4
- OLM/S4-1300和OLM/S4-1300
-
当前OLM与旧版本OLM的混合操作在兼容模式下是允许的(DIP开关S7=ON;警告:缺省设置 S7=OFF)。以下组合是可行的:
- OLM/P12和OLM/P4
- OLM/G12和OLM/S4
- OLM/G12-1300和OLM/S4-1300
-
注意事项:
带有集成FO(例如CP5613 FO, ET200S FO和CP 342-5 FO)接口的终端设备不支持接入冗余光纤环网。
-
参见条目号4884690和7542148。
-
警告:
塑料光纤不能连接到带玻璃光纤的OLM,反之亦然。
冗余光纤环网中的LED显示特性:
从任何信道收到的消息被传送到其它所有信道。如果在光信道接收到消息,那么该消息也作为“回波”被送到该信道的发送器,并且作为一个监测消息来检查OLM之间的光纤段。
OLM识别接收到的消息是回波还是传送的消息。如果是回波消息,信道的LED将保持熄灭。如果是传送的消息,信道的LED将点亮黄灯。在多于两个OLM的网络中,回波信号和传送的信号紧 紧相连。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
在冗余光纤环网中,相似的LED显示特性仅在下列情况下发生:
1. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度不同(差异> 大约2米)
在此条件下,接收OLM是首先收到较短光纤连接的发送消息。该信道将点亮黄色信道LED来表明这种情况。在另一光信道的信号则被认为是“回波信号”,而其信道LED将保持 熄灭。由于连接的光纤长度是不变的,因此显示特性也是保持不变。
-
组态1(光纤线路1 < 光纤线路2),LED显示A:
-
操作实例,光纤线路没有中断:
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮黄灯
|
CH2
|
LED = 不亮
|
|
CH3
|
LED = 不亮
|
CH3
|
LED = 点亮黄灯
|
-
错误实例,光纤线路1有中断
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮红灯
|
CH2
|
LED = 点亮黄灯
|
|
CH3
|
LED = 点亮黄灯
|
CH3
|
LED = 点亮红灯
|
-
错误实例,光纤线路2有中断
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮黄灯
|
CH2
|
LED = 点亮红灯
|
|
CH3
|
LED = 点亮红灯
|
CH3
|
LED = 点亮黄灯
|
-
组态 2 (光纤线路1 < 光纤线路2), LED显示A:
-
操作实例,光纤线路没有中断:
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮黄灯
|
CH2
|
LED = 点亮黄灯
|
|
CH3
|
LED = 不亮
|
CH3
|
LED = 不亮
|
-
错误实例,光纤线路1有中断
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮红灯
|
CH2
|
LED = 点亮红灯
|
|
CH3
|
LED = 点亮黄灯
|
CH3
|
LED = 点亮黄灯
|
-
错误实例,光纤线路2有中断
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
CH2
|
LED = 点亮黄灯
|
CH2
|
LED = 点亮黄灯
|
|
CH3
|
LED = 点亮红灯
|
CH3
|
LED = 点亮红灯
|
2. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度也恰好相等
在此调经爱女下,接收OLM同时接收到两个光线信道的消息。为了控制这种情况,OLM为这两个光信道分配优先级别。通过定义,将一个光信道的消息作为回波(信道LED = 关闭),另一个光信道的消息作为传送的消息(信道LED = 黄色)。
由于两个光接收信道之间的抖动影响和扫描的差异,或许会有两个光信道轮流首先收到消息的情况。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
-
组态 1/2 (光纤线路1 = 光纤线路2), LED显示A:
-
操作实例,光纤线路没有中断:
|
OLM 1
|
OLM 2
|
|
系统
|
LED = 点亮绿灯
|
系统
|
LED = 点亮绿灯
|
|
CH1
|
LED = 点亮黄灯
|
CH1
|
LED = 点亮黄灯
|
|
(持续点亮,闪烁,闪烁)
|
(持续点亮,闪烁,闪烁)
|
|
CH2
|
LED = 点亮黄灯
|
CH2
|
LED = 点亮黄灯
|
|
(持续点亮,闪烁,闪烁)
|
(持续点亮,闪烁,闪烁)
|
|
CH3
|
LED = 点亮黄灯
|
CH3
|
LED = 点亮黄灯
|
|
(持续点亮,闪烁,闪烁)
|
(持续点亮,闪烁,闪烁)
|


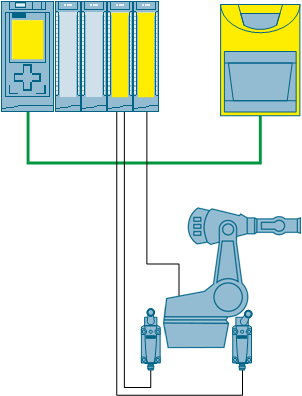
安全激光扫描仪与具有监视情况切换功能的 S7-1500
带机器人的装配单元具有两个工作站,操作员可自由地进行交替访问。操作期间,情况会根据机器人的运动发生变化:危险区域变成工作区域,反之亦然。


IRIUS 软起动器-S0规格、25 A、温度40°C时的值为11KW/400V、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3026-2BB04SIRIUS 软起动器-S0规格、25 A、温度40°C时的值为11KW/400V、交流200-480V、交流/直流24V、弹簧接线端子3RW3026-2BB14SIRIUS 软起动器-S0规格、25 A、温度40°C时的值为11KW/400V、交流200-480V、交流/直流110-230V、弹簧接线端子3RW3027-1BB04SIRIUS 软起动器-S0规格、32A、温度40°C时的值为15KW/400V、交流200-480V、交流/直流24V、螺钉接线端子3RW3027-1BB14SIRIUS 软起动器-S0规格、32A、温度40°C时的值为15KW/400V、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3027-2BB04SIRIUS 软起动器-S0规格、32A、温度40°C时的值为15KW/400V、交流200-480V、交流/直流24V、弹簧接线端子3RW3027-2BB14SIRIUS 软起动器-S0规格、32A、温度40°C时的值为15KW/400V、交流200-480V、交流/直流110-230V、弹簧接线端子3RW3028-1BB04SIRIUS 软起动器-S0规格、38A、温度40°C时的值为18.5KW/400V、交流200-480V、交流/直流24V、螺钉接线端子3RW3028-1BB14SIRIUS 软起动器-S0规格、38A、温度40°C时的值为18.5KW/400V、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3016-2BB04SIRIUS软起动器-S00规格、9A、1.5KW/400V、40°C、交流200-480V、交流/直流24V、弹簧端子3RW3016-2BB14SIRIUS软起动器-S00规格、9A、400V额定功率4kW、40°C、交流200-480V、交流/直流110-230V、弹簧端子3RW3017-1BB04SIRIUS软起动器-S00规格、12.5A、400V额定功率5.5kW、40°C、交流200-480V、交流/直流24V、螺钉接线端子3RW3017-1BB14
西门子软启动器代理商
SIRIUS软起动器-S00规格、12.5A、400V额定功率5.5kW、40°C、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3017-2BB04SIRIUS软起动器-S00规格、12.5A、400V额定功率5.5kW、40°C、交流200-480V、交流/直流24V、弹簧端子3RW3017-2BB14SIRIUS软起动器-S00规格、12.5A、400V额定功率5.5kW、40°C、交流200-480V、交流/直流110-230V、弹簧端子3RW3018-1BB04SIRIUS软起动器-S00规格、17.6A、7.5KW/400V、40°C、交流200-480V、交流/直流24V、螺钉接线端子3RW3018-1BB14SIRIUS软起动器-S00规格、17.6A、7.5KW/400V、40°C、交流200-480V、交流/直流110-230V、螺钉接线端子3RW3018-2BB04SIRIUS软起动器-S00规格、17.6A、7.5KW/400V、40°C、交流200-480V、交流/直流24V、弹簧端子3RW3018-2BB14SIRIUS软起动器-S00规格、17.6A、7.5KW/400V、40°C、交流200-480V、交流/直流-230V、弹簧端子3RW3013-1BB04SIRIUS软起动器-S00规格、3.6A、1.5KW/400V、40°C、交流200-480V、交流/直流24V、螺钉端子3RW3013-1BB14SIRIUS软起动器-S00规格、3.6A、1.5KW/400V、40°C、交流200-480V、交流/直流110-230V、螺钉端子3RW3013-2BB04SIRIUS软起动器-S00规格、3.6A、1.5KW/400V、40°C、交流200-480V、交流/直流24V、弹簧端子3RW3013-2BB14SIRIUS软起动器-S00规格、3.6A、1.5KW/400V、40°C、交流200-480V、交流/直流110-230V、弹簧端子3RW3014-1BB04SIRIUS软起动器-S00规格、6.5A、1.5KW/400V、40°C、交流200-480V、交流/直流24V、螺钉端子3RW3014-1BB14SIRIUS软起动器-S00规格、6.5A、400V额定功率3kW、40°C、交流200-480V、交流/直流110-230V、螺钉端子3RW3014-2BB04SIRIUS软起动器-S00规格、6.5A、1.5KW/400V、40°C、交流200-480V、交流/直流24V、弹簧端子3RW3014-2BB14SIRIUS软起动器-S00规格、6.5A、1.5KW/400V、40°C、交流200-480V、交流/直流110-230V、弹簧端子3RW3016-1BB04SIRIUS软起动器-规格S00;9A、1.5KW/400V,40°C,交流200-480V,交直流24V,螺钉接线端子3RW3016-1BB14SIRIUS软起动器-S00规格、9A、400V额定功率4kW、40°C、交流200-480V、交流/直流110-230V、螺钉接线端子采购电话: 田敏
3RW3036-1BB14---3RW3014-1CB14---3RW4055-6BB44---3RW4056-6BB44---3RW4073-6BB44
3RW4075-6BB44---3RW4076-6BB44---3RW4056-6BB45---3RW4423-1BC44---3RW4424-1BC44
3RW4426-1BC35---3RW4425-1BC44---3RW4426-1BC36---3RW4426-1BC44---3RW4425-1BC45
3RW4425-1BC36---3RW4427-1BC44---3RW4422-1BC34---3RW4422-1BC36---3RW4422-1BC44
3RW4422-1BC46---3RW4422-1BC34---3RW4422-1BC35---3RW4422-1BC46---3RW4434-2BC36
3RW4435-2BC34---3RW4435-2BC36---3RW4424-3BC35---3RW4424-3BC36---3RW4426-3BC45
3RW4426-3BC46---3RW4427-3BC34---3RW4427-3BC36---3RW4425-3BC34---3RW4434-6BC44
3RW4435-6BC44---3RW4436-6BC44---3RW4443-6BC44---3RW4444-6BC44---3RW4445-6BC44
3RW4446-6BC44---3RW4447-6BC44---3RW4453-6BC44---3RW4454-6BC44---3RW4455-6BC44
编辑
数控机床的基本组成包括加工程序载体、数控装置、伺服驱动装置、机床主体和其他辅助装置。下面分别对各组成部分的基本工作原理进行概要说明。
加工程序载体采购电话: 田敏
数控机床工作时,不需要工人直接去操作机床,要对数控机床进行控制,必
高速数控机床高速数控机床
须编制加工程序。零件加工程序中,包括机床上刀具和工件的相对运动轨迹、工艺参数(进给量主轴转速等)和辅助运动等。将零件加工程序用一定的格式和代码,存储在一种程序载体上,如穿孔纸带、盒式磁带、软磁盘等,通过数控机床的输入装置,将程序信息输入到CNC单元。
数控装置
数控装置是数控机床的核心。现代数控装置均采用CNC(Computer Numerical Control)形式,这种CNC装置一般使用多个微处理器,以程序化的软件形式实现数控功能,因此又称软件数控(Software NC)。CNC系统是一种位置控制系统,它是根据输入数据插补出理想的运动轨迹,然后输出到执行部件加工出所需要的零件。因此,数控装置主要由输入、处理和输出三个基本部分构成。而所有这些工作都由计算机的系统程序进行合理地组织,使整个系统协调地进行工作。
1)输入装置:将数控指令输入给数控装置,根据程序载体的不同,相应有不同的输入装置。主要有键盘输入、磁盘输入、CAD/CAM系统直接通信方式输入和连接上级计算机的DNC(直接数控)输入,现仍有不少系统还保留有光电阅读机的纸带输入形式。
(1)纸带输入方式。可用纸带光电阅读机读入零件程序,直接控制机床运动,也可以将纸带内容读入存储器,用存储器中储存的零件程序控制机床运动。
(2)MDI手动数据输入方式。操作者可利用操作面板上的键盘输入加工程序的指令,它适用于比较短的程序。
在控制装置编辑状态(EDIT)下,用软件输入加工程序,并存入控制装置的存储器中,这种输入方法可重复使用程序。一般手工编程均采用这种方法。
在具有会话编程功能的数控装置上,可按照显示器上提示的问题,选择不同的菜单,用人机对话的方法,输入有关的尺寸数字,就可自动生成加工程序。
(3)采用DNC直接数控输入方式。把零件程序保存在上级计算机中,CNC系统一边加工一边接收来自计算机的后续程序段。DNC方式多用于采用CAD/CAM软件设计的复杂工件并直接生成零件程序的情况。
2)信息处理:输入装置将加工信息传给CNC单元,编译成计算机能识别的信
不同类型的数控机床
不同类型的数控机床(13张)
西门子6EP1334-2BA01性能及参数
西门子6EP1334-2BA01性能及参数
西门子6EP1334-2BA01性能及参数





 文档 (1.0 MB)
文档 (1.0 MB)
 TIA Portal V13 SP1 的项目示例,SICK S3000 的配置文件 (12.8 MB)
TIA Portal V13 SP1 的项目示例,SICK S3000 的配置文件 (12.8 MB)
